DJI Mavic Miniの知識
DJI Mavic Miniの知識
ここでは、DJI Mavic Mini(マビック・ミニ)の知識を紹介します。
DJI Mavic Miniに関するこの他の情報については
DJI Mavic Miniの説明書 重量199g/249gの2.7Kビデオ空撮ミニドローン
をご覧ください。
DJI Mavic Miniの説明書 重量199g/249gの2.7Kビデオ空撮ミニドローン
Show this page in English
もくじ
クイックショットの挙動
DJI Mavic Miniには、クイックショットと呼ぶ、下記のような空撮用の飛行モードが搭載されています。 いずれかのモードが起動されると、自動的に約15秒のビデオが録画されます。- Rocket (ロケット)
- Mavic Miniは、カメラを下の被写体に向けたまま、まっすぐ上昇します。上昇高度は 25m, 30m, 35m 40m から設定できます。
- Circle (サークル)
- Mavic Miniは、撮影開始位置での高度と距離を保ったまま、被写体の周りを、上から見て右回りに旋回します。360度旋回すると撮影終了します。
- Dronie (ドローニー)
- Mavic Miniは、カメラで被写体をとらえたまま、後方および上方に飛行します。飛行距離は 25m, 30m, 35m 40m から設定できます。
- Helix (ヘリックス)
- Mavic Miniは、撮影開始位置での高度と距離からスタートして、被写体の周りを右回りに旋回しながら後方および上方に飛行します。最大半径は 10m, 15m, 20m, 25m, 30m, 35m, 40m から設定できます。360度旋回すると撮影終了します。
DJI Mavic Miniの飛行モード
standard Position (P) モード
通常の飛行に適したモードです。 ポジションモードは、GPS信号が強い場合に最適に機能します。 Mavic Miniは、GPSとビジョンポジショニングシステムを利用して、自身の位置を特定し、安定させます。 このモードでは、インテリジェントフライトモードが有効になっています。 下向きビジョンシステムが有効で、照明条件が十分な場合、最大飛行高度角度は20º、最大飛行速度は8 m / sです。 ビジョンシステムが使用できないか無効になっている場合、およびGPS信号が弱い場合、またはコンパスが干渉を受ける場合、Mavic Miniは自動的に姿勢(ATTI)モードに変わります。 ビジョンシステムが利用できない場合、Mavic Miniは自動的に位置を合わせたり、自動的にブレーキをかけたりすることができず、フライトの危険性が高まります。 ATTIモードでは、Mavic Miniは周囲の影響を受けやすくなります。 風などの環境要因は、特に狭いスペースを飛行する場合に、危険をもたらす可能性がある水平方向のシフトを引き起こす可能性があります。
Sport (S) モード
スポーツモードでは、Mavic Miniは位置測位にGPSとビジョンシステムを使用します。 スポーツモードでは、機体の応答がより敏しょうかつ高速になり、操縦スティックの動きに対する応答性が向上します。 最大飛行速度は13 m / s、最大上昇速度は4 m / s、最大降下速度は3 m / sです。
- スポーツモードでは、Mavic Miniの最高速度と制動距離が大幅に増加します。 無風状態で、最低30 mの制動距離が必要です。
- スポーツモードでは、降下速度が大幅に増加します。無風状態で、10 m以上の制動距離が必要です。
- スポーツモードでは、Mavic Miniの応答性が大幅に向上します。つまり小さなコントロールスティックの動きで、Mavic Miniが大きな距離を移動することになります。十分な飛行スペースを確保し、より慎重に操縦してください。
CineSmooth (C) モード
ビデオ撮影に適したモードです。 シネスムースモードはポジションモードをベースにしており、飛行速度が制限されているため、撮影中のMavic Miniの安定性が向上します。 最大飛行速度は4 m / s、最大上昇速度は1.5 m / s、最大降下速度は1 m / sです。



Return to Home(ホームに戻る)機能
ホームに戻る(RTH)機能は、ドローンを最後に記録されたホームポイントに戻します。 ワンタッチでドローンを離陸地点に呼び戻すことができます。 しかしMavic Miniには障害物検知機能がないので、自動で戻る途中に立ち木などの障害物があった場合、かまわず突っ込んでしまいます。 あくまでRTH機能は非常時の最終手段として使用してください。RTHには、スマートRTH、ローバッテリーRTH、およびフェールセーフRTHの3つのタイプがあります。 またデフォルトのホームポイントは、電源投入後にドローンが強力な衛星測位システム(GNSS)信号を受信した最初の場所です (画面のGNSS衛星アイコンが白くなり、少なくとも4本のバーが点灯したとき)。 ホームポイントが記録されると、Mavic Miniのステータスインジケータが緑色にすばやく点滅します。
スマートRTH (Smart RTH)
GPS信号が十分に強い場合は、スマートRTHを使用してドローンをホームポイントに戻すことができます。 スマートRTHは、DJI FlyアプリのRTHアイコンをタップするか、リモートコントローラーのRTHボタンを押し続けると開始されます。 スマートRTHを終了するには、同じくDJI FlyアプリのRTHアイコンをタップするか、リモートコントローラーのRTHボタンを押します。
ローバッテリーRTH (Low Battery RTH)
インテリジェントフライトバッテリーが消耗して、ドローンが安全に帰還できない可能性がある場合、ローバッテリーRTHが起動します。 バッテリー残量が少なくなると、DJI Flyアプリは警告を表示します。 警告が表示されたらすぐにホームポイントに戻すか、着陸させます。
警告が表示され、10秒のカウントダウン終了までに何も操作が行われなかった場合は、ドローンは自動的にホームポイントに戻ります。 ユーザーは、リモコンのRTHボタンを押すことでRTH動作をキャンセルできます。 しかし、バッテリー残量低下の警告表示の後にRTHがキャンセルされると、ドローンが安全に着陸するのに十分な電力がないため、墜落したり紛失したりする可能性があります。
現在の高度から降下できるだけのバッテリー残量しか残っていない場合は、ドローンは自動的に着陸します。 ユーザーは自動着陸をキャンセルできませんが、リモートコントローラーを使用して着陸プロセス中にドローンの方向を変更できます。
フェールセーフRTH (Failsafe RTH)
ホームポイントが正常に記録され、コンパスが正常に機能している場合、リモートコントローラーの信号が11秒以上失われると、フェイルセーフRTHが自動的にアクティブになります。 あるいは、飛行中にビデオリンク信号が失われたうえで、リモートコントローラーがまだドローンの動きを制御できる場合は、RTHを開始するプロンプトが表示されます。 この場合のRTHはキャンセルできます。
RTHモード起動後の注意点
Mavic Miniで、一旦RTHモードが起動されると、その後ビデオの撮影に不具合が発生する場合があります。 録画ボタンを押しても録画されなかったり、再生できない不正なビデオファイルが生成されたりします。 RTHモードが起動した後は、必ず一度ドローンを着陸させて、電源をOFF/ONして再起動しましょう。
RTH機能の挙動
- ドローンの電源が投入され、GPSの電波を受信すると、ホームポイントが記録されます。
- 飛行中、何らかの理由により、RTH機能が起動されます。
- 高度が20 m未満の場合、ドローンは、設定されたRTH高度または20 mに上昇してから、向きを調整します。 高度が20 mを超える場合、ドローンはすぐに向きを調整します。
-
- RTHの開始時にドローンがホームポイントから20 m以上離れている場合、事前に設定されたRTH高度まで上昇し、8 m / sの速度でホームポイントまで飛行します。 現在の高度が、設定されたRTH高度よりも高い場合、ドローンは現在の高度でホームポイントに飛行します。
- RTHの開始時にドローンがホームポイントから20 m未満の場合、すぐに着陸します。
- ホームポイントに到達すると、ドローンは着陸し、モーターが停止します。
- GPS信号が弱いか利用できない場合は、ドローンはホームポイントに戻ることができません。 RTHの開始後にGPS信号が弱くなるか使用できなくなると、ドローンはしばらくホバリングしてから着陸を開始します。
-
各フライトの前に適切なRTH高度を設定することが重要です。
これはDJI Flyアプリで画面右上の
 (設定)
アイコンをタップし、[安全]メニューの[自動RTH高度]で指定します。
スマートRTHおよびローバッテリーRTHでは、ドローンは自動的にRTH高度まで上昇します。
ドローンの高度が20 m以上で、まだRTH高度に達していない場合は、スロットルスティックを動かして航空機の上昇を停止できます。
ドローンはその時の高度でホームポイントに直接飛行します。
(設定)
アイコンをタップし、[安全]メニューの[自動RTH高度]で指定します。
スマートRTHおよびローバッテリーRTHでは、ドローンは自動的にRTH高度まで上昇します。
ドローンの高度が20 m以上で、まだRTH高度に達していない場合は、スロットルスティックを動かして航空機の上昇を停止できます。
ドローンはその時の高度でホームポイントに直接飛行します。
- RTH飛行中には、リモートコントローラーの信号が正常な場合は、リモートコントローラーまたはDJI Flyアプリを使用してドローンの速度、高度、および姿勢を制御できますが、飛行方向は制御できません。
- GEOゾーン(飛行制限空域等)の存在はRTH飛行のコースに影響を与えます。 また、風速が強すぎると、ドローンはホームポイントに戻ることができない場合があります。 注意して飛行してください。

着陸保護(Landing Protection)
着陸保護は、スマートRTH中に有効になります。- 着陸保護中、ドローンは適切な地面を自動的に検出し、穏やかに着陸します。
- 着陸保護機能が、地面が着陸に適していないと判断した場合、Mavic Miniはホバリングし、パイロットの確認を待ちます。
- 着陸保護が機能していない場合、Mavic Miniが0.5 m未満に降下すると、DJI Flyアプリの画面に着陸プロンプトを表示します。 スロットルスティックを引き下げるか、自動着陸スライダーを使用して着陸します。
プロペラの交換
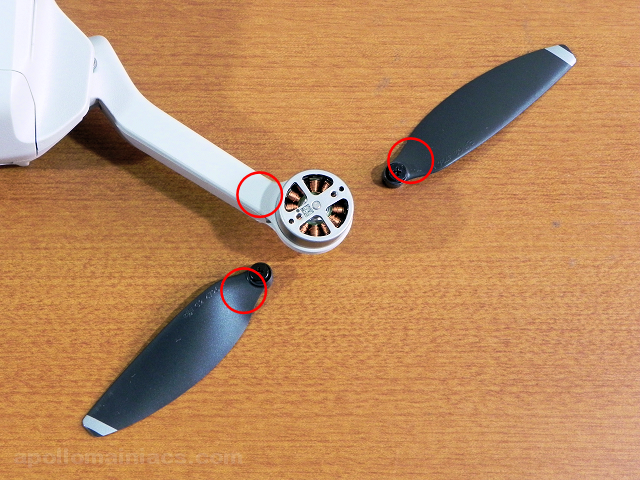
 Mavic Miniのプロペラには、取り付けるモーターの回転方向により2種類のデザインがあります。
この2種類は、付け根のマークの有無、およびブレード先端の模様の違いで区別できます。
マークのあるプロペラはマークのあるアームに取り付けます。
Mavic Miniのプロペラには、取り付けるモーターの回転方向により2種類のデザインがあります。
この2種類は、付け根のマークの有無、およびブレード先端の模様の違いで区別できます。
マークのあるプロペラはマークのあるアームに取り付けます。
 こちらはマークのないアームとプロペラです。
こちらはマークのないアームとプロペラです。
プロペラのパッケージ1つ(1組)には、マークのあるプロペラ2枚とマークのないプロペラ2枚、合計4枚のプロペラと、ねじ4本が入っています。 1機全部のプロペラを交換するには、2組のパッケージが必要です。 別売の純正プロペラ (DJI) には、2組(8枚:1機分)のパッケージが入っています。
日本版では、DJI Mini 2 と Mavic Mini のプロペラは共通です。 海外版ではデザインが変更されており、DJI Mini 2 はプロペラ先端のラインの色がオレンジに変更されています。
DJI Mini 2 / Mavic Miniのアクセサリ
- • プロペラの取り付け、取り外しは、Mavic Miniに付属しているドライバーで行います。 2枚のブレードとネジを、同じパッケージから取り出し、同時に交換してください。
- • 離陸の前には毎回、プロペラに傷や割れが無いこと、プロペラがしっかりと取り付けられていること、を確認してください。 およそ飛行30時間(60回)毎に、プロペラのねじを締めなおしてください。

ファームウェアのアップデート
ドローン本体、コントローラーやバッテリーに内蔵のプログラム(ファームウェア)は、改善や不具合修正などで時々更新されます。 最新のファームウェアが使用できるようになったらMavic Miniをアップデートしましょう。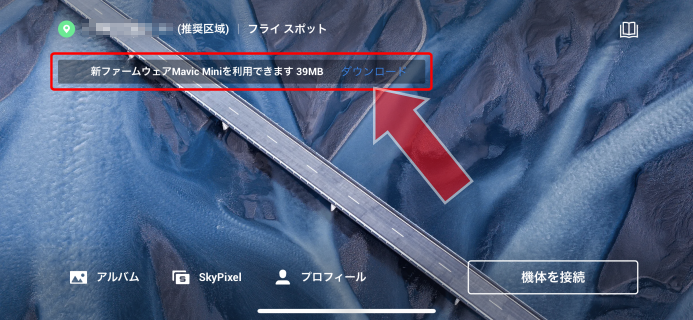 iPhoneをインターネットに接続した状態でDJI Flyアプリを起動すると、新しいファームウェアアップデートが利用可能かどうかが通知されます。
iPhoneをインターネットに接続した状態でDJI Flyアプリを起動すると、新しいファームウェアアップデートが利用可能かどうかが通知されます。
このような表示が現れたら「ダウンロード」をタップします。
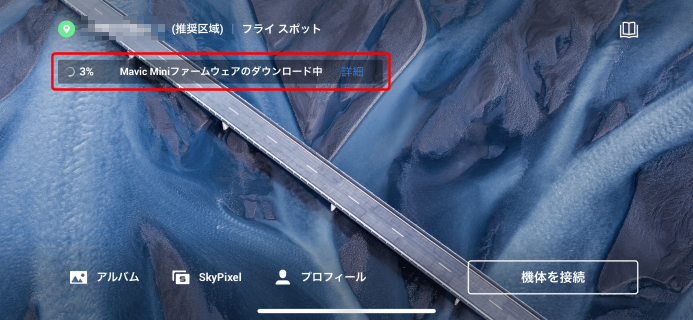 するとファームウェアのダウンロードが始まります。
ここで「詳細」をタップすると・・・
するとファームウェアのダウンロードが始まります。
ここで「詳細」をタップすると・・・
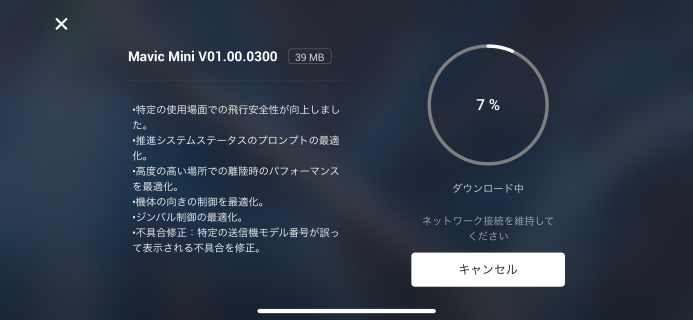 バージョンアップの内容の詳細と、ダウンロードの進捗状況が確認できます。
左上の「×」マークをタップするとDJI Flyアプリのホーム画面に戻ります。
バージョンアップの内容の詳細と、ダウンロードの進捗状況が確認できます。
左上の「×」マークをタップするとDJI Flyアプリのホーム画面に戻ります。
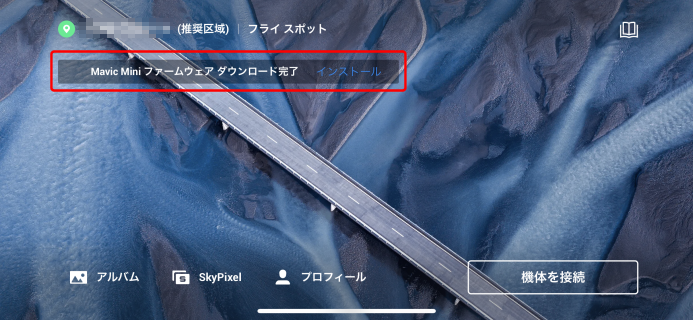 ダウンロードが完了すると「インストール」の表示が出ます。
iPhoneをリモートコントローラーに接続し、Mavic Miniとリモートコントローラーの電源を入れます。
そして「インストール」をタップします。
ダウンロードが完了すると「インストール」の表示が出ます。
iPhoneをリモートコントローラーに接続し、Mavic Miniとリモートコントローラーの電源を入れます。
そして「インストール」をタップします。
注意: iPhone、Mavic Mini、リモートコントローラーすべてのバッテリーが十分に充電されていないときに「インストール」を行わないでください。 インストール途中に電源が切れると、Mavic Miniが使用不能になる可能性があります。
 するとインストールが始まります。
なにも操作せず、そのまま待ちます。
するとインストールが始まります。
なにも操作せず、そのまま待ちます。
途中Mavic Miniが何度か再起動します。そのたびにDJI Flyアプリの画面が切り替わります。 またインストールの進捗に従って、コントローラーの4つのLEDがいろいろなパターンで明滅します。
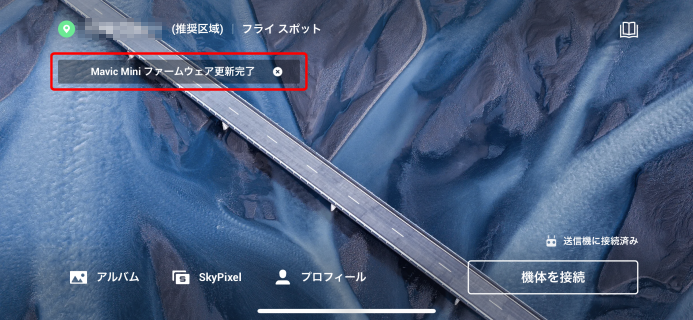 インストールが完了すると、このように「ファームウェア更新完了」と表示されます。
このときMavic Miniの電源がオフになっている場合があります。
飛行させたいときは、Mavic Miniの電源をオンにしてください。
インストールが完了すると、このように「ファームウェア更新完了」と表示されます。
このときMavic Miniの電源がオフになっている場合があります。
飛行させたいときは、Mavic Miniの電源をオンにしてください。
手動でアップデートを確認する
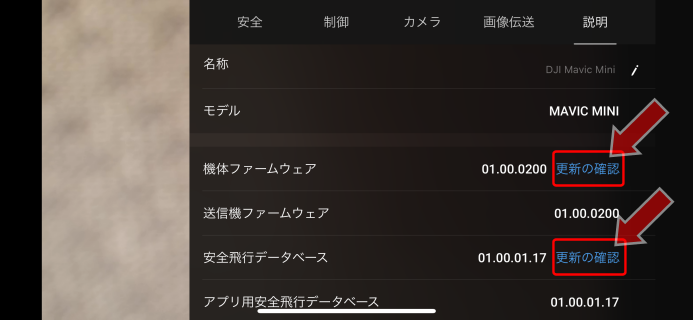 手動でアップデートを行うには、DJI FlyアプリでMavic Miniと接続し、画面右上の
手動でアップデートを行うには、DJI FlyアプリでMavic Miniと接続し、画面右上の
IMUのキャリブレーション
IMU(Inertial Measurement Unit)とは加速度計やジャイロスコープから成る、慣性航法装置です。 飛行中のドローンの姿勢制御(ピッチ、ロール)に重要な役割を果たします。 もしDJI Flyアプリの画面にIMUエラーが表示されたら、キャリブレーションを行います。 キャリブレーションにかかる時間はほんの30秒ほどです。キャリブレーションの手順
 Mavic Miniとコントローラーを起動し、水平な机などの上に置き、自分から向かって、機首を左に向けます。
アームはたたんでおきます。
Mavic Miniとコントローラーを起動し、水平な机などの上に置き、自分から向かって、機首を左に向けます。
アームはたたんでおきます。
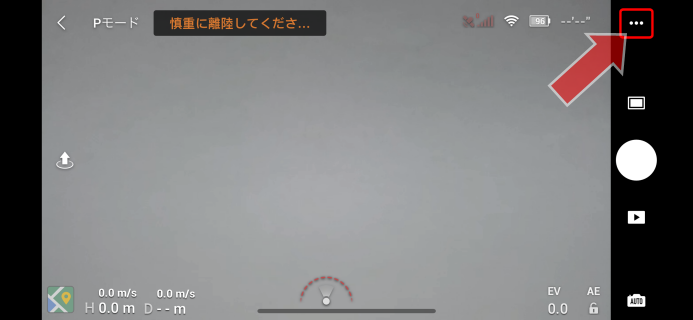 DJI Flyアプリの画面右上の
DJI Flyアプリの画面右上の
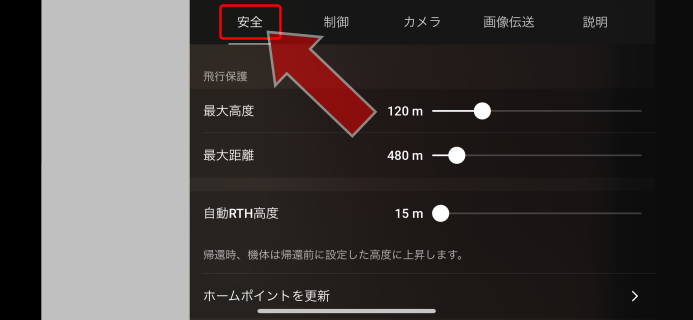 メニューから[安全]を選びます。
メニューから[安全]を選びます。
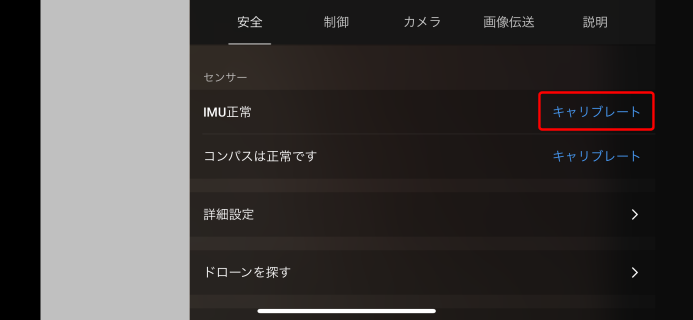 「センサー」欄の、IMUの表示の右にある[キャリブレート]をタップします。
「センサー」欄の、IMUの表示の右にある[キャリブレート]をタップします。
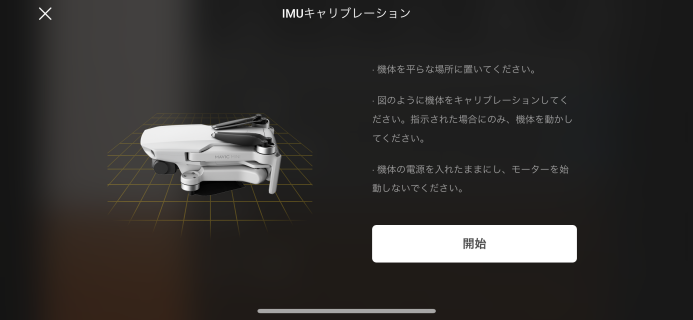 キャリブレーションの画面が表示されるので「開始」をタップし、アプリ画面の指示に従います。
キャリブレーションの画面が表示されるので「開始」をタップし、アプリ画面の指示に従います。
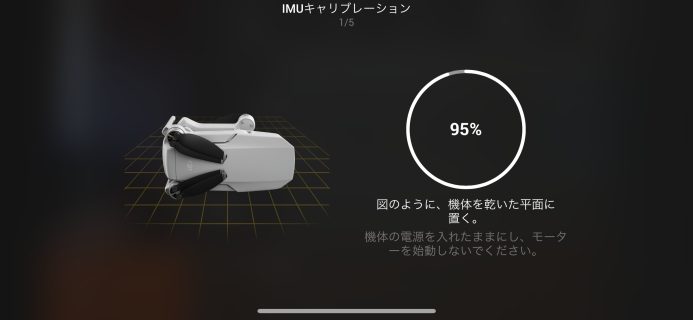 数秒待つと、アプリの画面に、Mavic Miniの方向を変えるよう指示が出ます。
機体を持ち上げて、機体上部が自分のほうに、機首が右を向くように持ちます。
できるだけ機体を動かさないようにして、キャリブレーションが終わるのを待ちます。
数秒待つと、アプリの画面に、Mavic Miniの方向を変えるよう指示が出ます。
機体を持ち上げて、機体上部が自分のほうに、機首が右を向くように持ちます。
できるだけ機体を動かさないようにして、キャリブレーションが終わるのを待ちます。
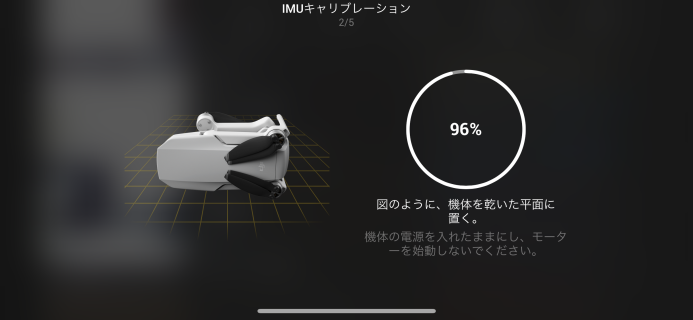 つぎは機体上部が自分のほうに、機首が左を向くように持ちます。
つぎは機体上部が自分のほうに、機首が左を向くように持ちます。
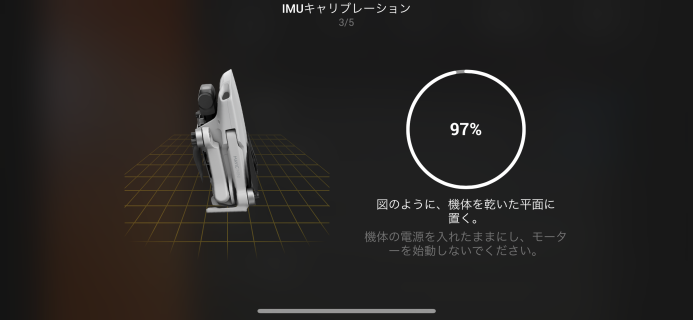 つぎは機首が上を向くように持ちます。
つぎは機首が上を向くように持ちます。
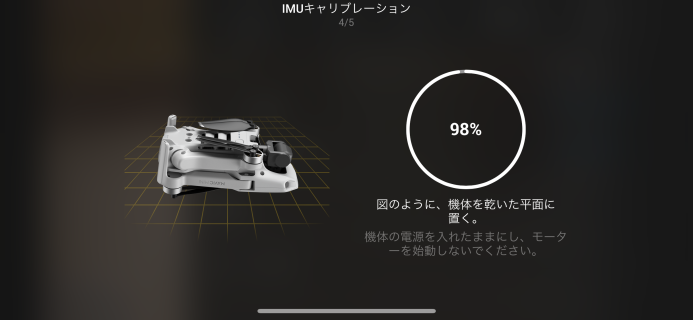 最後は、機体を裏返して、機首を右に向けます。
最後は、機体を裏返して、機首を右に向けます。
 DJI Flyアプリの画面に完了の表示が出たら、キャリブレーション終了です。
DJI Flyアプリの画面に完了の表示が出たら、キャリブレーション終了です。
Inertial measurement unit(Wikipedia)
コンパスのキャリブレーション
次のいずれかの状況で屋外で飛行する場合、コンパスのキャリブレーションを行うことをお勧めします。- ドローンを最後に飛行させた場所から31マイル(50 km)以上離れた場所で飛行させる場合。
- ドローンを30日以上飛行させていない場合。
- DJI Flyアプリの画面にコンパス干渉警告が表示されるか、Mavic Miniのステータスインジケーターが、赤と黄色に交互に点滅した場合。
- • 磁性体の近くや、鉄骨の駐車場、鉄筋コンクリートの建物、鉄橋、車、足場などの大きな金属構造など、磁気干渉が発生する可能性のある場所でコンパスのキャリブレーションを行わないでください。
- • キャリブレーションを行う時には、ドローンの近くに強磁性材料を含む物体(携帯電話など)を持ち込まないでください。
- • 屋内で飛行させる場合は、コンパスのキャリブレーションは必要ありません。
キャリブレーションの手順
近くに金属や磁性体のない、屋外の広い場所に移動します。
Mavic Miniを起動し、DJI Flyアプリの画面右上の
メニューから[安全]を選びます。
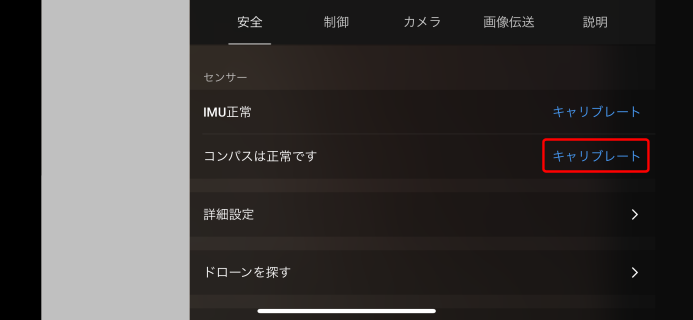 「センサー」欄の、コンパスの表示の右にある[キャリブレート]をタップします。
「センサー」欄の、コンパスの表示の右にある[キャリブレート]をタップします。
 キャリブレーションの画面が表示されるので「開始」をタップし、アプリ画面の指示に従います。
ステータスインジケータが黄色に点滅し、キャリブレーションが開始されたことを示します。
キャリブレーションの画面が表示されるので「開始」をタップし、アプリ画面の指示に従います。
ステータスインジケータが黄色に点滅し、キャリブレーションが開始されたことを示します。
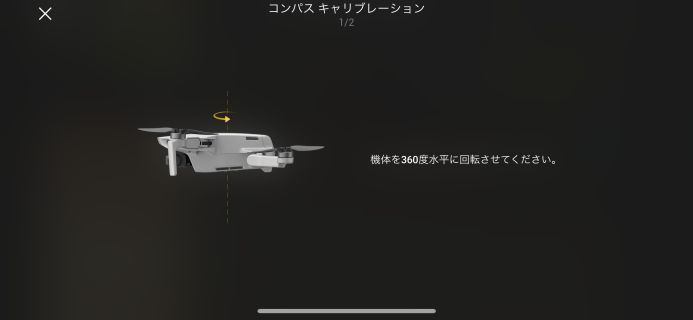 ドローンを水平に持ち、360度回転させます。
ステータスインジケータが緑色に点灯します。
ドローンを水平に持ち、360度回転させます。
ステータスインジケータが緑色に点灯します。
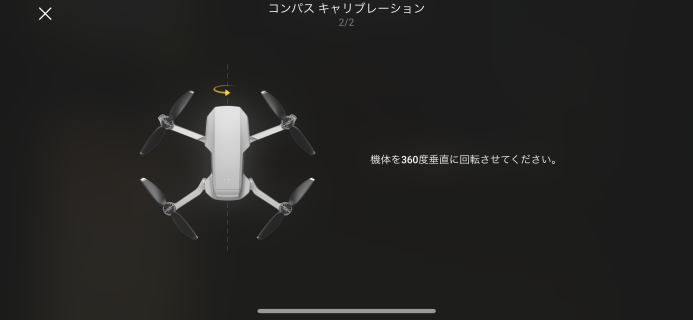 つづいて機首を上に向けて垂直に持ち、垂直軸を中心に360度回転させます。
つづいて機首を上に向けて垂直に持ち、垂直軸を中心に360度回転させます。
 DJI Flyアプリの画面に完了の表示が出たら、キャリブレーション終了です。
DJI Flyアプリの画面に完了の表示が出たら、キャリブレーション終了です。
- • ステータスインジケータが赤色に点滅した場合、キャリブレーションは失敗しています。 場所を変更して、キャリブレーションを再試行してください。
- • キャリブレーションの完了後にステータスインジケータが赤と黄色に交互に点滅した場合は、磁気干渉レベルが高く、現在の場所が飛行に適していないことを示します。 飛行させる場所を変更してください。
- • コンパスのキャリブレーションが必要な場合は、離陸前にDJI Flyアプリにプロンプトが表示されます。
- • キャリブレーションが完了したら、ドローンをすぐに離陸させることができます。 キャリブレーション完了後に、離陸前に3分以上待機した場合、キャリブレーションプロセスを繰り返す必要があります。
ジンバルについて


ジンバル操作モード
2つのジンバル操作モードが利用可能です。 これはDJI Flyアプリで切り替えます。
- Follow Mode
- ジンバルの角度と、ドローンの先端との間の角度は常に一定に保たれます。
- FPV Mode
- ジンバルはドローンの動きと同期して、一人称視点の飛行体験を提供します。
- • ドローンの電源が入っているときは、ジンバルをタップしたりノックしたりしないでください。 ジンバルを保護するために、ひらけた平らな面から離陸してください。
- • 衝突または衝撃を受けると、ジンバルの精密部品が損傷する可能性があります。これにより、ジンバルが異常動作する可能性があります。
- • ジンバル、特にジンバルモーターに、ほこりや砂がつかないようにしてください。
-
• 次の状況で、ジンバルモーターエラーが発生する可能性があります。
- a. ドローンが平らでない地面に置かれているか、ジンバルの動作が遮られている。
- b. ジンバルに、衝突などの過度の外力を受けた場合。
- • 電源が入っているときに、ジンバルに外力を加えないでください。 ジンバルに余分なものを追加しないでください。ジンバルの動作が異常になったり、モーターの損傷を引き起こす可能性があります。
- • 電源を入れる前に、必ずジンバルカバーを取り外してください。また、ドローンを使用しないときは、ジンバルカバーを取り付けてください。
- • 濃い霧や雲の中で飛行すると、ジンバルが結露して一時的な故障につながる可能性があります。この場合は、乾燥するとすべての機能が回復します。
ビジョンシステムと赤外線検知システム
下向きビジョンシステム(Downward Vision System)は1台のカメラで構成され、赤外線検知システム(Infrared Sensing System)は2つの3D赤外線モジュールで構成されています。 これらのシステムは、ドローンが現在の位置を維持し、より正確にホバリングし、屋内やその他のGPSが利用できない環境で飛行するときに役立ちます。
センサー有効領域
下向きビジョンシステムは、ドローンが0.5〜10 mの高度にあり、その飛行範囲が0.5〜30 mのときに最適に機能します。


ビジョンシステムの使用
GPSが利用できないときに、地表にカメラで識別可能なパターンと十分な光がある場合、下向きビジョンシステムが有効になります。 下向きビジョンシステムは、ドローンが0.5〜10 mの高度にあるときに最適に機能します。 ドローンの高度が10 mを超える場合は、ビジョンシステムがうまく機能しない可能性があるため、特別な注意が必要です。

下向きビジョンシステムを有効にするには
- ドローンが平らな面にあることを確認してください。 そしてドローンの電源を入れます。
- ドローンは離陸後に定位置にホバリングします。 下向きビジョンシステムが機能すると、ステータスインジケータが緑色に2回点滅します。
- • GPSが利用できないとき、ドローンの最大ホバー高度は5 mです。
- • ドローンが水上または雪に覆われたエリアを飛行している場合には、ビジョンシステムが正常に機能しないことがあります。
- • ドローンの飛行速度が速すぎると、ビジョンシステムが正常に機能しない場合があります。 高度 2 m(6.6 ft)で10 m / s(32.8 ft / s)、高度 1 m(3.3 ft)で 5 m / s(16.4 ft)を超える速度で飛行する場合は注意して飛行してください。
-
• ビジョンシステムは、明確なパターンがない表面上では適切に動作しません。 次のいずれの状況では、ビジョンシステムは正常に機能しません。 慎重にドローンを操作してください。
- a. モノクロの表面上を飛行する場合(例:真っ黒、真っ白、または緑一色などに塗りつぶされた平面の上)。
- b. 高い反射面の上を飛行する場合。
- c. 水面または透明な表面の上を飛行する場合。
- d. 動いている表面または物体の上を飛行する場合。
- e. 照明が頻繁にまたは急激に変化するエリアで飛行する場合。
- f. 極端に暗い(< 10ルクス)または明るい(> 40,000ルクス)表面の上を飛行する場合。
- g. 赤外線を強く反射または吸収する表面(鏡など)の上を飛行する場合。
- h. 明確なパターンやテクスチャがない表面の上を飛行する場合。
- i. 同一のパターンまたはテクスチャが繰り返される表面の上を飛行する場合(例:同じデザインが続くタイル)。
- J. 表面積の小さい障害物の上を飛行する場合(例:木の枝)。
- • センサーは常に清潔に保ってください。 センサーを改造しないでください。 ほこりや湿気のある環境でドローンを使用しないでください。 赤外線検知部を遮らないでください。
- • 雨の日、煙の多い日、または視界が悪い場合は飛行しないでください。
-
• 毎回離陸前に以下を確認してください。
- a. 赤外線検知部およびビジョンシステムの上にステッカーやその他の障害物がないことを確認してください。
- b. 赤外線検知部およびビジョンシステムに汚れ、ほこり、または水が付着している場合は、柔らかい布で拭いてください。 アルコールを含む洗剤は使用しないでください。
- C. 赤外線検知部およびビジョンシステムのガラスに損傷がある場合は、DJIサポートにお問い合わせください。
もっとiPhoneのことを知りたい