初心者のためのBetaflight Configuratorのインストールと使い方
初心者のためのBetaflight Configuratorのインストールと使い方
Betaflight Configurator (ベータフライト・コンフィギュレーター)を使うと、ファームウェアにBetaflightを採用しているドローンのFC(Flight Controller)の設定を確認・変更できます。
ここでは、Betaflight ConfiguratorをWindowsパソコンにインストールする方法と基本的な使い方、そして初心者がドローンを入手して最初にチェックすべきいくつかの項目を紹介します。

Betaflight Configuratorのダウンロード
Betaflight ConfiguratorはGithubで配布されています。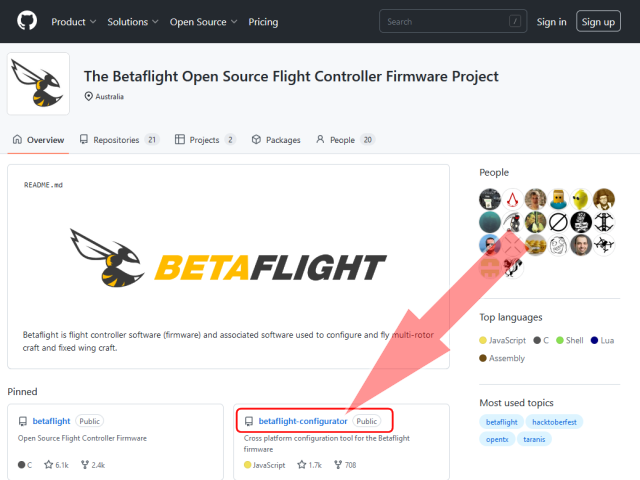 Githubの
Betaflightのページ
を開きます。
このような画面になるので「betaflight-Configurator」をクリックします。
「betaflight」ではありません。
Githubの
Betaflightのページ
を開きます。
このような画面になるので「betaflight-Configurator」をクリックします。
「betaflight」ではありません。
なお、「betaflight-configurator-nightlies」というリンクもありますが、これは Nightly build、いわゆるベータ版なので、動作が不安定であったりバグが含まれている可能性があります。 開発者向けのバージョンなので、一般ユーザーは使用しないでください。
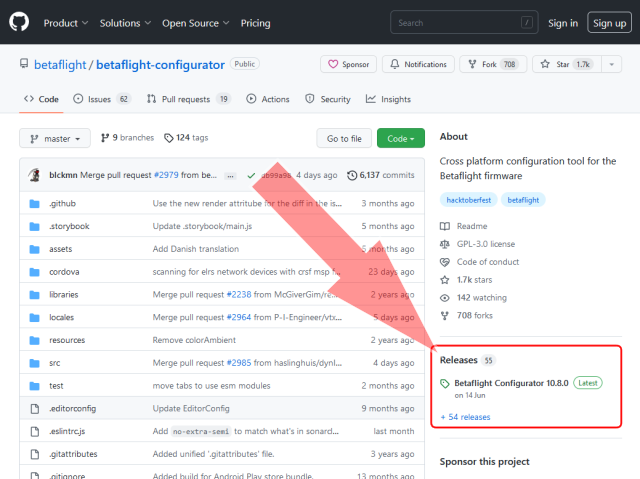 「betaflight-Configurator」のページが開くので、画面右の「Releases」をクリックします。
なお「Latest」をクリックすると最新版のページに移行できます。
「betaflight-Configurator」のページが開くので、画面右の「Releases」をクリックします。
なお「Latest」をクリックすると最新版のページに移行できます。
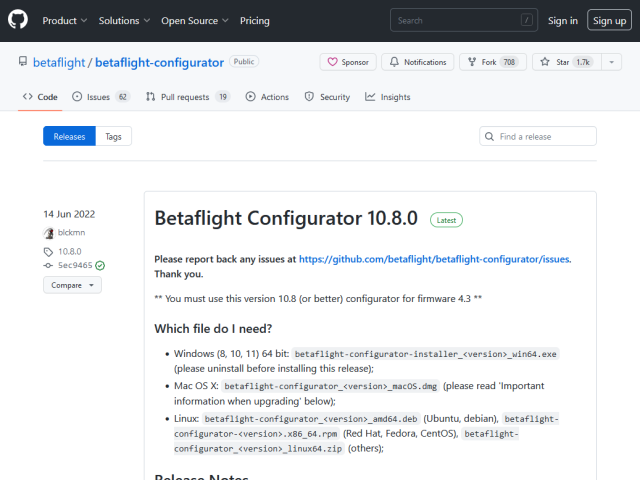 「betaflight-Configurator」のリリースページ
が開きます。
この画面では、過去のバージョンを含め、任意のバージョンの betaflight-Configurator をダウンロードすることができます。
一番上にあるのが最新バージョンです。
「betaflight-Configurator」のリリースページ
が開きます。
この画面では、過去のバージョンを含め、任意のバージョンの betaflight-Configurator をダウンロードすることができます。
一番上にあるのが最新バージョンです。
バージョン番号の後ろに"Release Candidate"と書かれているものは、RC(Release Candidate:リリース候補)版です。 RC版は評価中のバージョンであるため、バグを含んでいる可能性があります。 一般ユーザーは極力使用しないでください。
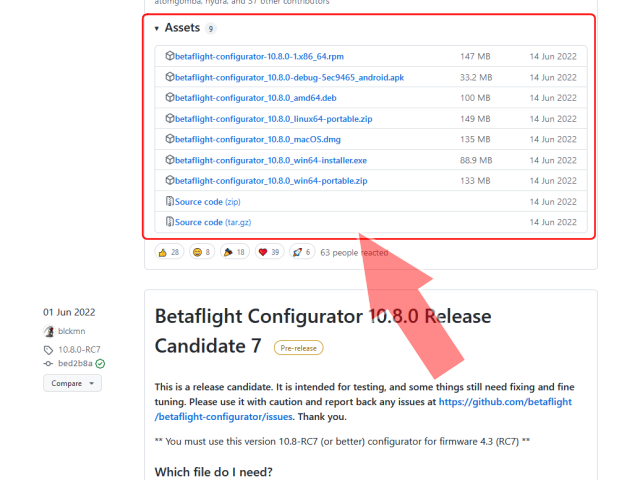 この画面をスクロールすると、“Assets”欄に、各OS別のダウンロードリンクがあります。
これをクリックするとインストールモジュールをダウンロードすることができます。
下記の表を参考にして、お使いのOSにあったリンクをクリックしてください。
この画面をスクロールすると、“Assets”欄に、各OS別のダウンロードリンクがあります。
これをクリックするとインストールモジュールをダウンロードすることができます。
下記の表を参考にして、お使いのOSにあったリンクをクリックしてください。
Windowsの場合は「_win64-Insaller.exe」または「_win64-portable.zip」で終わるファイル名をクリックします。 「_win64-Insaller.exe」を使うと、画面の指示に従うだけでインストールできます。
| OS | ファイル名 |
|---|---|
| Windows (8, 10, 11) | betaflight-configurator-[version]_win64-installer.exe |
| Mac OS X | betaflight-configurator_[version]_macOS.dmg |
| Ubuntu, debian | betaflight-configurator_[version]_amd64.deb |
| Red Hat, Fedora, CentOS | betaflight-configurator-[version].x86_64.rpm |
| その他のLinux | betaflight-configurator_[version]_linux64-portable.zip |
| Android (プレビュー版) | betaflight-configurator-debug-[version]_android.apk |
Betaflight Configuratorのインストール
 ダウンロードしたBetaflight Configuratorのインストーラー「_win64-Insaller.exe」をダブルクリックすると、インストールが始まります。
最初はインストールモードの選択です。お好みで選択してください。
ダウンロードしたBetaflight Configuratorのインストーラー「_win64-Insaller.exe」をダブルクリックすると、インストールが始まります。
最初はインストールモードの選択です。お好みで選択してください。
 つづいてインストールに使用する言語の選択です。こちらもお好みで選択してください。
つづいてインストールに使用する言語の選択です。こちらもお好みで選択してください。
 あなたのパソコンに、古いバージョンのBetaflight Configuratorがインストールされていた時には、アンインストーラーが起動します。
アンインストールが終わるとこのような画面になります。
「閉じる」をクリックします。
あなたのパソコンに、古いバージョンのBetaflight Configuratorがインストールされていた時には、アンインストーラーが起動します。
アンインストールが終わるとこのような画面になります。
「閉じる」をクリックします。
 ソフトウェアのライセンス契約の許諾画面です。
「同意する」を選択して「次へ」をクリックします。
ソフトウェアのライセンス契約の許諾画面です。
「同意する」を選択して「次へ」をクリックします。
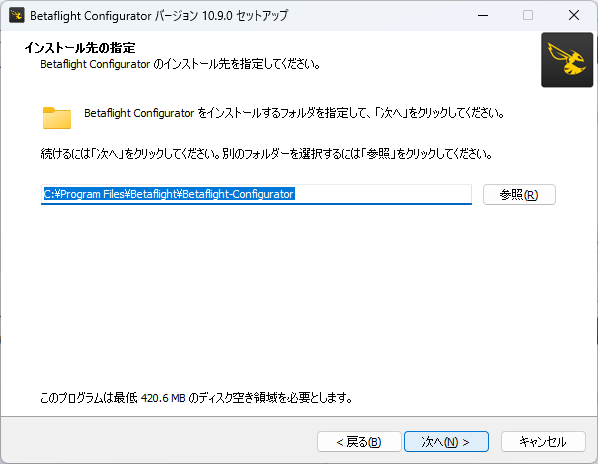 つづいてインストール先フォルダを選択します。
特に変更する必要はないでしょう。
「次へ」をクリックします。
つづいてインストール先フォルダを選択します。
特に変更する必要はないでしょう。
「次へ」をクリックします。
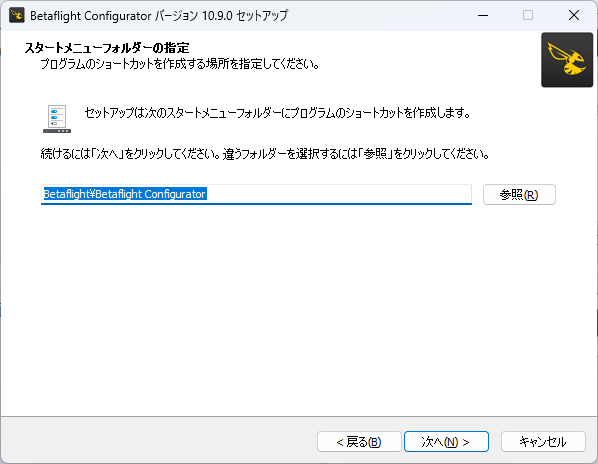 つづいてスタートメニューフォルダを選択します。
特に変更する必要はないでしょう。
「次へ」をクリックします。
つづいてスタートメニューフォルダを選択します。
特に変更する必要はないでしょう。
「次へ」をクリックします。
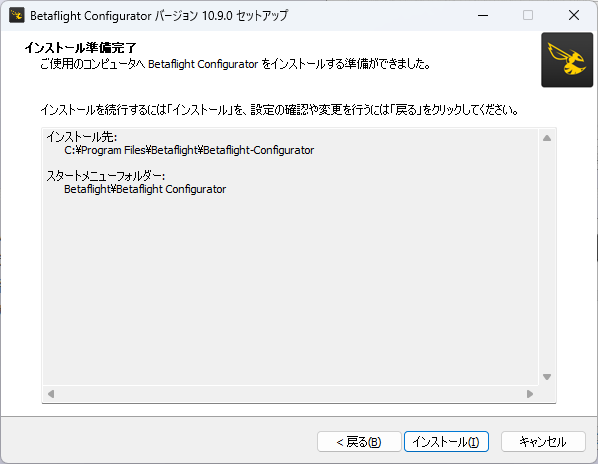 このような画面となります。
「インストール」をクリックします。
このような画面となります。
「インストール」をクリックします。
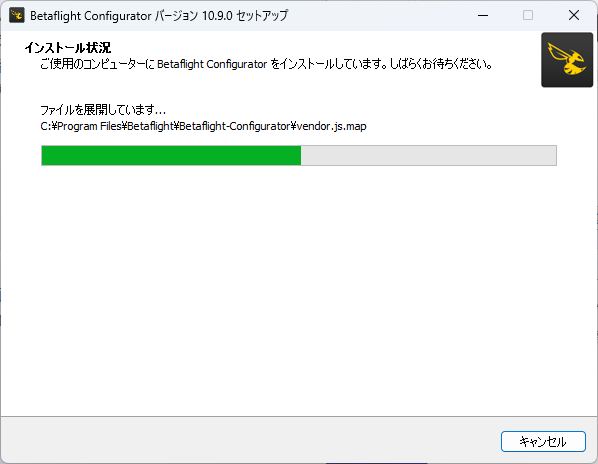 インストールが始まります。
インストールにかかる時間は数分から十数分程度です。
インストールが始まります。
インストールにかかる時間は数分から十数分程度です。
インストールの終盤で、画面のプログレスバーの進捗がとても遅くなりますが、そのまま放置すればやがてインストールは終了します。
 このような画面になるとインストール完了です。
「完了」をクリックします。
このような画面になるとインストール完了です。
「完了」をクリックします。
 するとBetaflight Configuratorが起動します。
ファームウェアにBetaflightが採用されたドローンとパソコンをUSBケーブルで接続し、画面右上の「接続」ボタンをクリックすると、ドローンの情報が読み出し・更新できます。
するとBetaflight Configuratorが起動します。
ファームウェアにBetaflightが採用されたドローンとパソコンをUSBケーブルで接続し、画面右上の「接続」ボタンをクリックすると、ドローンの情報が読み出し・更新できます。
あるいは画面右上にある「自動接続」スイッチをオンにしておくと、USBケーブルを接続するだけでドローンとパソコンが接続されます。
モーターを回さない範囲で、ドローンの設定をチェック・変更する場合は、ドローンにバッテリーを接続する必要はありません。 モーターを回す場合には、バッテリーを接続してからパソコンに接続します。
USBケーブルには、すべての端子が結線された「データ通信用」と、電源系の端子のみが結線された「充電用」の2種類があります。 Betaflight Configuratorと通信するには「データ通信用」を使用する必要があります。 ケータイや充電器、バッテリーなどのオマケについているケーブルには「充電用」のものがあるので注意してください。
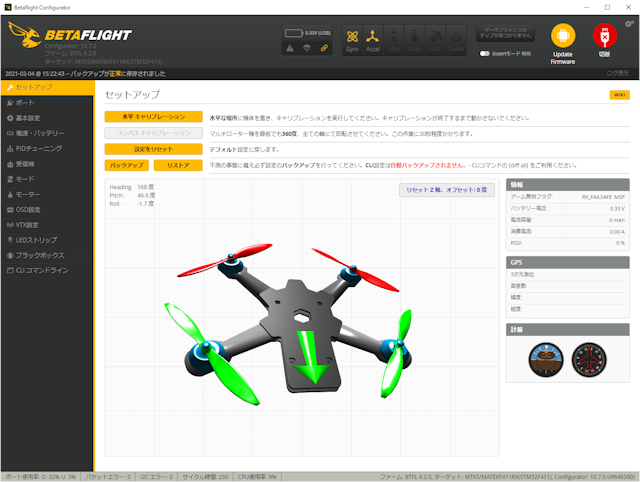 無事ドローンが接続されると、このような画面になります。
ドローンを動かすと、ジャイロセンサーの値をもとに、画面の3DCGが動きます。
無事ドローンが接続されると、このような画面になります。
ドローンを動かすと、ジャイロセンサーの値をもとに、画面の3DCGが動きます。
ドローンが接続できないときは、一旦Betaflight Configuratorを終了させて、先にドローンをパソコンに接続してからBetaflight Configuratorを起動してみてください。
 ドローンをパソコンに接続して、電源が入った状態で長時間置いておくと、VTXが熱を持って暴走し、最悪故障する場合があります。
パソコンとの接続時間は最低限とし、時々カメラに息を吹きかけて冷却してください。
近くに小型の扇風機などを置いておくのも効果があります。
ドローンをパソコンに接続して、電源が入った状態で長時間置いておくと、VTXが熱を持って暴走し、最悪故障する場合があります。
パソコンとの接続時間は最低限とし、時々カメラに息を吹きかけて冷却してください。
近くに小型の扇風機などを置いておくのも効果があります。
水平キャリブレーションと設定のバックアップ
「セットアップ」画面で水平キャリブレーションを行うことができます。
ドローンを水平にしたときに、画面の3DCGが水平にならないときは、センサーのキャリブレーションを行う必要があります。
ドローンを水平に固定したうえで「水平キャリブレーション」をクリックします。
水平キャリブレーションが少しでもズレていると、飛行中に軌道がふらつくだけでなく、離陸時に突然横っ飛びにすっ飛んでいくこともあります。
前後、左右から機体を見て、慎重に機体を水平状態にしたうえでキャリブレーションしてください。
段ボールなどで簡易なスタンドを作るのもよいと思います。
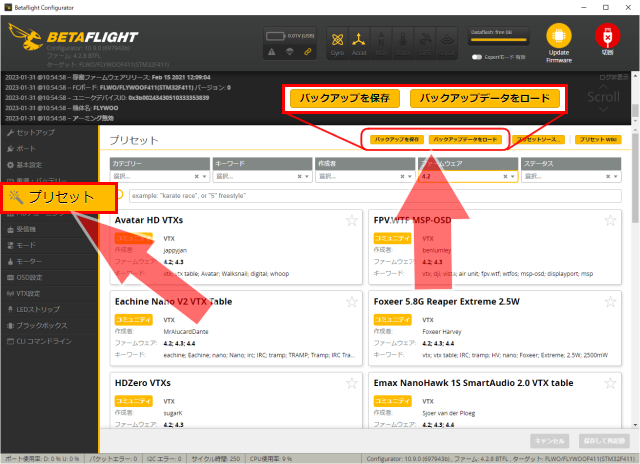 左のメニューから「プリセット」を選びます。
そして上部に並ぶボタンから「バックアップを保存」をクリックします。
するとFCの設定の読み出しが行われ、フォルダー選択のダイアログボックスが表示されます。
バックアップを保存したいフォルダーを選択すると、そこにテキスト形式で設定のバックアップが保存されます。
左のメニューから「プリセット」を選びます。
そして上部に並ぶボタンから「バックアップを保存」をクリックします。
するとFCの設定の読み出しが行われ、フォルダー選択のダイアログボックスが表示されます。
バックアップを保存したいフォルダーを選択すると、そこにテキスト形式で設定のバックアップが保存されます。
下記の"diff all"コマンドによる操作と同じ情報が採取できます。
 または
CLI画面
で"diff all"と入力することで、ドローンの設定値のバックアップを取ることができます。
ドローンを入手したら、最初にこれを採取しておきましょう。
詳しくは
CLIコマンドの使用
をご覧ください。
または
CLI画面
で"diff all"と入力することで、ドローンの設定値のバックアップを取ることができます。
ドローンを入手したら、最初にこれを採取しておきましょう。
詳しくは
CLIコマンドの使用
をご覧ください。
チャンネルマップ、プロポとの接続状況の確認
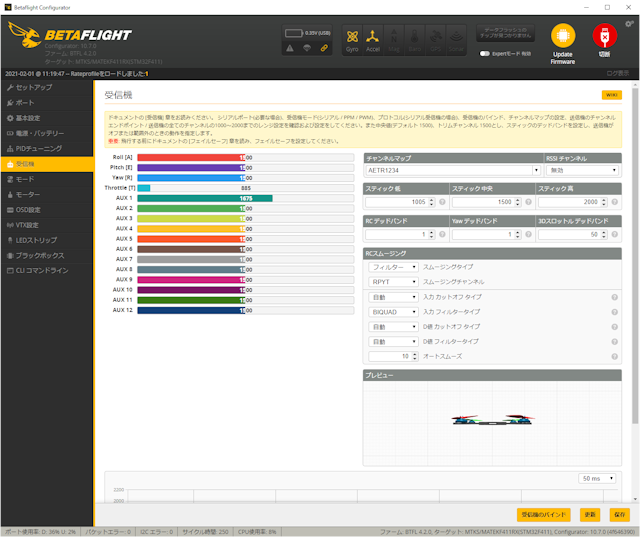 「受信機」画面の「チャンネルマップ」欄では、このドローンのチャンネルマップ(例:"AETR")が確認できます。
バインド前に、ドローンのチャンネルマップが不明の時は、ここで確認/変更できます。
「受信機」画面の「チャンネルマップ」欄では、このドローンのチャンネルマップ(例:"AETR")が確認できます。
バインド前に、ドローンのチャンネルマップが不明の時は、ここで確認/変更できます。
また、画面左のバーグラフでは、プロポとドローンの接続状況を確認することができます。 プロポとドローンをバインドしたのちに、プロポのスティックやスイッチを操作すると、ここのバーグラフが動きます。 ドローンが正しくプロポの信号を受信しているか、また各スイッチが期待通りのチャンネルに設定できているかが確認できます。
Betaflight Configuratorのいくつかの設定画面の右下には、「更新」と「保存」ボタンが並んでいます。 画面上で値を変更したときは、「保存」ボタンをクリックすると、その値がドローンに反映されます。 逆に「更新」ボタンをクリックすると、ドローンの設定値を読み出して画面に反映します。
この画面では、プロポのスティック(Roll, Pitch, Yaw)から指を離した時には、パルス長が1500μsecとなるよう、プロポを調整してください。 また、最大に振り切ったときに「スティック高」欄の値より大きく、最小に振り切ったときに「スティック低」欄の値より小さくなるよう、プロポを調整してください。 OpenTX/EdgeTXを搭載したプロポでは、これらの値は「OUTPUT」画面で調整可能です。
なお、スティックから指を離した時に中央値がバタつくときは、各「デッドバンド」欄でその幅(最大10程度)を指定してください。 これらが調整できていないと、ドローンがまっすぐ飛びません。
RCデッドバンド: ロール、ピッチスティックの中央値のジッター(揺れ)を無視する幅を指定します。
Yawデッドバンド: ヨースティックの中央値のジッターを無視する幅を指定します。
各チャンネルへ割り当てられている機能の確認
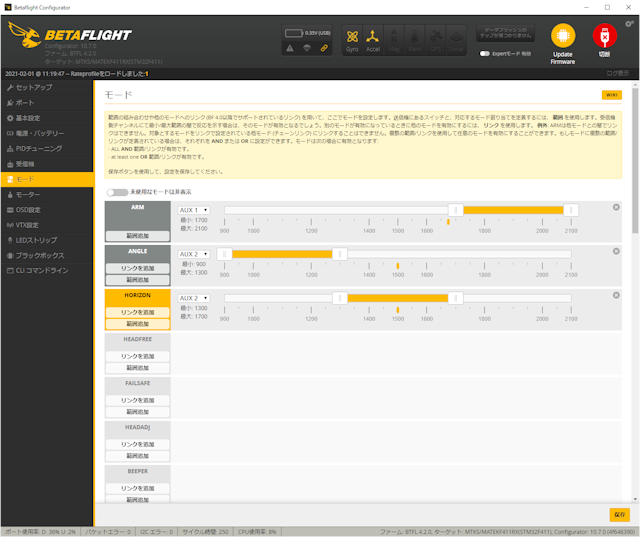 「モード」画面では、ドローンの各チャンネルへ割り当てられている機能を確認することができます。
「モード」画面では、ドローンの各チャンネルへ割り当てられている機能を確認することができます。
この画面の例では、ARM機能が「AUX1(チャンネル5)」のパルス長「1700 - 2100 μsec」に割り当てられています。 プロポのスイッチからは「下」のとき1000μsec未満、「中」のとき1500μsec、「上」のとき2000μsec以上のパルスが送信されます。 このため、チャンネル5にスイッチを割り当て、それを「上」の位置に切り替えるとARM機能が有効になることを示しています。
またフライトモードANGLEとHORIZONがともに「AUX2(チャンネル6)」に割り当てられています。 この場合は、チャンネル6に3ポジションスイッチを割り当てると、「下」でANGLEモード、「中」でHORIZONモード、「上」でACROモード(フライトモードが何も指定されていないときはACROモードになる)に切り替えることができます。
VTX送信チャンネルの設定
 「VTX設定」画面では、FPVカメラのビデオ信号の送信チャンネルが設定できます。
「VTX設定」画面では、FPVカメラのビデオ信号の送信チャンネルが設定できます。
バンド欄とチャンネル欄を指定し、画面右下の「保存」をクリックすると設定されます。 日本で使用可能な送信チャンネルは下記の通り限定されているので、それに合わせて設定してください。 複数のドローンを持っているときは、すべてのドローンのチャンネルをそろえておくと、ゴーグルのスキャン機能を使う必要がなくなります。
DShotビーコン(ブザー)の設定
DShotビーコンという機能を使うと、モーターを振動させて、ビープ音を鳴らすことができます。 物理的なブザーを搭載していない小型のドローンでも、墜落させて見失ったときに、探すのが容易になります。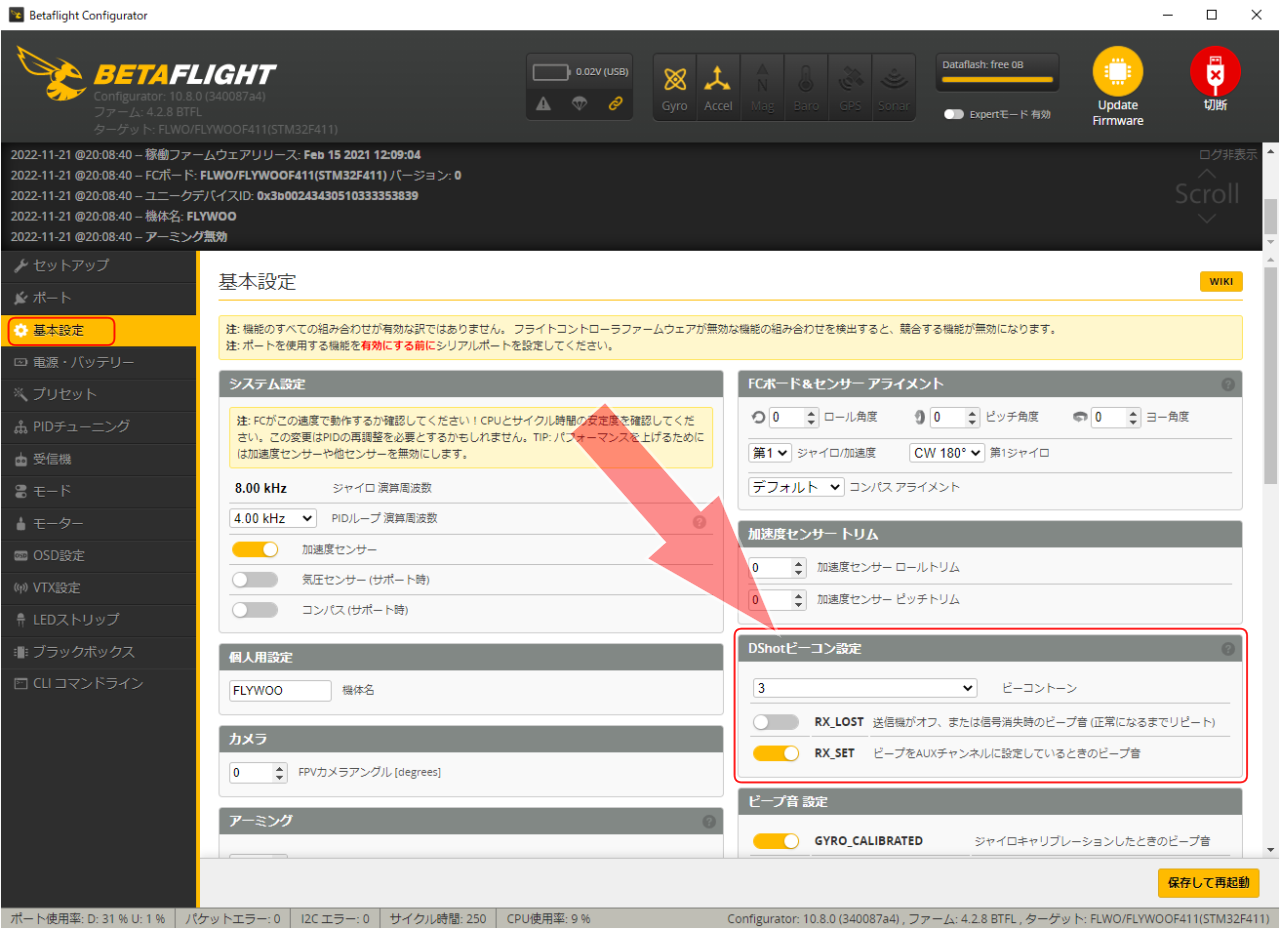 まず「基本設定」画面を開き、「DShotビーコン設定」欄の各項目をセットします。
まず「基本設定」画面を開き、「DShotビーコン設定」欄の各項目をセットします。
「ビーコントーン」欄では、鳴らす音の種類(1~5、0は無音)が選べます。
「RX_LOST」をオンにすると、プロポとの通信が途切れたときにブザーが鳴ります。
「RX_SET」をオンにすると、プロポのスイッチからブザーがON/OFFできます。
最後に画面右下の「保存して再起動」ボタンをクリックします。
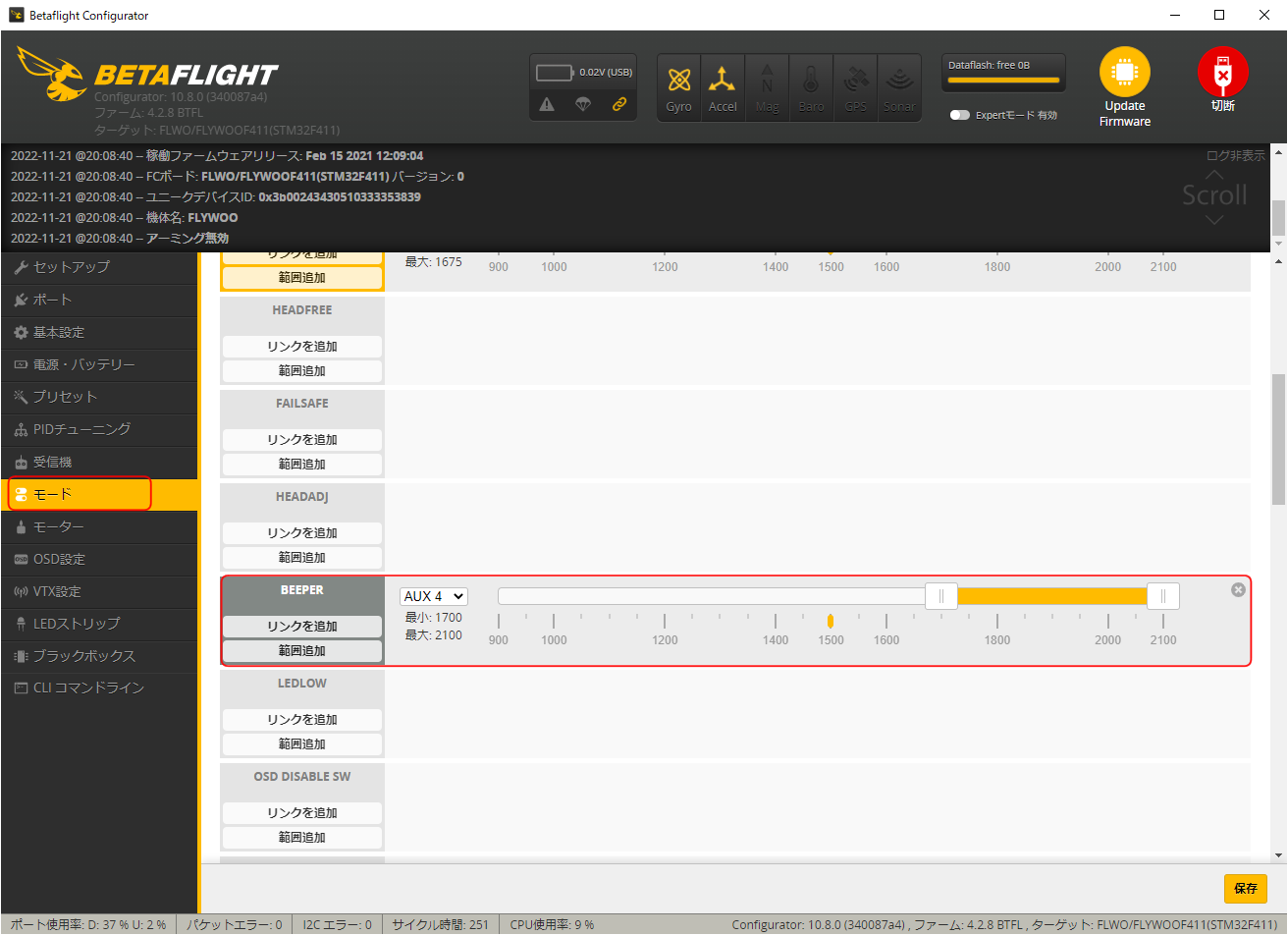 つづいて「モード」画面で「BEEPER」の「範囲追加」をクリックして有効にし、任意のチャンネルに割り当てます。
そして画面右下の「保存」ボタンをクリックします。
図の例では「AUX 4(チャンネル8)」に割り当てたスイッチを「上」にするとブザーが鳴ります。
つづいて「モード」画面で「BEEPER」の「範囲追加」をクリックして有効にし、任意のチャンネルに割り当てます。
そして画面右下の「保存」ボタンをクリックします。
図の例では「AUX 4(チャンネル8)」に割り当てたスイッチを「上」にするとブザーが鳴ります。
CLIコマンドの使用
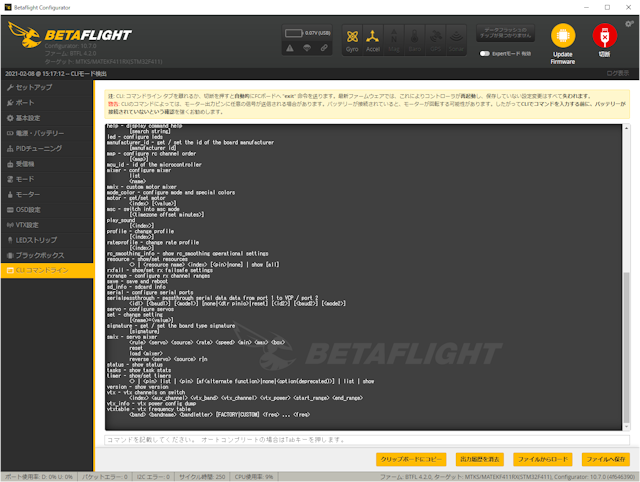
「CLIコマンドライン」画面では、キーボードからのコマンド入力(CLI : Command Line Interface)で、ドローンのすべての設定を行うことができます。
画面下部の「コマンドを記載してください」と書かれているテキストボックスにコマンドを入力し、[Enter]キーを押すとコマンドが入力されます。 また画面右下の「ファイルへ保存」をクリックすると、画面に表示されたCLIのやり取りをテキストファイルとして保存することができます。
[get]コマンドで、各種設定値の現在値を読み出し、[set]コマンドで、それらの変更ができます。ただし最後に[save]コマンドを入力しないと、変更がドローンに反映されません。
[help]コマンドで、使用可能なCLIコマンドの一覧を表示します。
[diff]コマンドで、デフォルト値との差分の一覧を表示します。ドローン入手時に"diff all"と入力して、表示された結果を「ファイルへ保存」しておけば、いつでも購入直後の状態に戻せます。「ファイルへ保存」または「クリップボードにコピー」ボタンを使って、テキストファイルなどに保存しておきます。
[dump]コマンドで、設定値の一覧をダンプします。
[bind_rx]または[bind_rx_spi]コマンドで、ドローンをバインドモードにします(受信機がFCボードに内蔵されている場合)。
ドローンのメーカーWebサイトでは、製品の[diff]や[dump]コマンドの実行結果を「CLI DIFF」や「CLI DUMP」と呼んで、テキストファイルで配布している場合があります。 [defaults]コマンドでリセットしたうえで、 このテキストファイルの内容を「CLIコマンドライン」画面にコピペし、[Enter]キーを押すと、ドローンを工場出荷状態に初期化することができます。
注意:Betaflightのバージョンによっては、古い"diff all"の結果を貼り付けると、正しくパラメータが設定されない場合があります。 この場合は手動で1項目ずつ確認・変更してください。
PIDプロファイルとRateプロファイルのチューニング
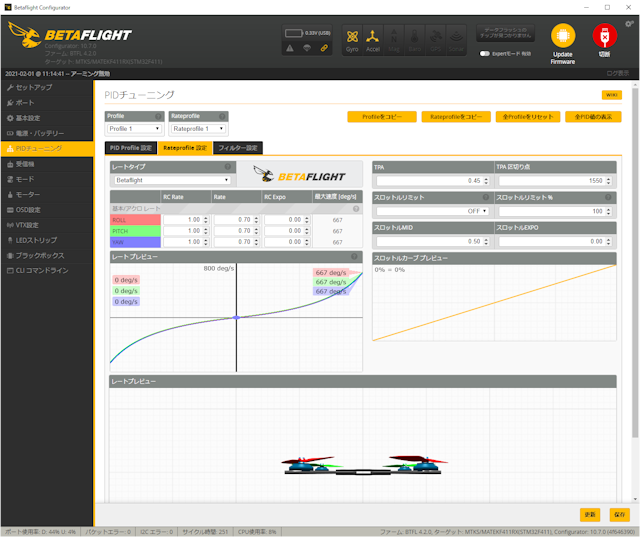 「PIDチューニング」画面では、ドローンの飛行特性を決めるPIDプロファイルや、プロポのスティック操作に対する反応等を調整できるRateプロファイルにアクセスできます。
画面左上のプロファイル選択ドロップダウンメニューで、PIDプロファイルは3種類、Rateプロファイルは6種類を保存/切り替えできます。
「PIDチューニング」画面では、ドローンの飛行特性を決めるPIDプロファイルや、プロポのスティック操作に対する反応等を調整できるRateプロファイルにアクセスできます。
画面左上のプロファイル選択ドロップダウンメニューで、PIDプロファイルは3種類、Rateプロファイルは6種類を保存/切り替えできます。
簡単には、まずはP値とRC Rate値を少しずつ大きくして、操作性を試してみるとよいと思います。
チューニングの方法については、下記の各サイトの情報が参考になります。
 または、
VelociDrone
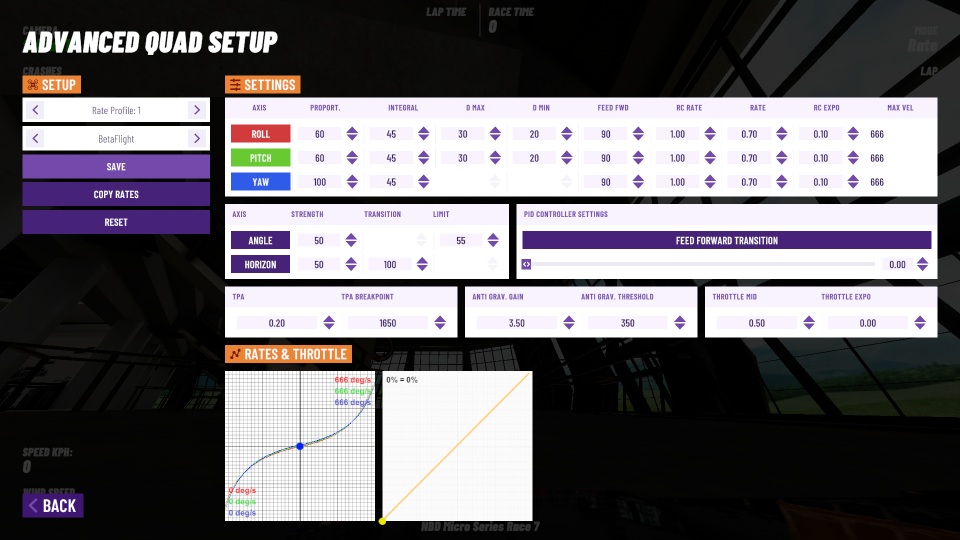
のようなドローンシミュレーターを使うと、PIDプロファイル、Rateプロファイルの変更の効果をパソコン上でシミュレーションすることができます。
または、
VelociDrone
のようなドローンシミュレーターを使うと、PIDプロファイル、Rateプロファイルの変更の効果をパソコン上でシミュレーションすることができます。
図に示したVelociDroneの初期値を参考にして、実機に適用してみるのもよいと思います。
FCのファームウェアを更新する:Betaflightをバージョンアップする
FC(フライトコントローラー)のファームウェア:Betaflightを更新/バージョンアップすることができます。 ただし必ずしも最新版にアップデートすることが、あなたのドローンにとって良いこととは限りません。 現在のバージョンで特に飛行に問題がないなら、バージョンアップは不要です。ドライバー:STM32 BOOTLOADERのインストール
Windowsパソコンで、プロセッサにSTM32を使用した、FPVドローンやOpenTX/EdgeTXプロポのファームウェアにアクセスするには、「STM32 BOOTLOADER」というドライバーをインストールする必要があります。 通常このドライバーは自動的にはインストールされないので、手動でインストールする必要があります。 詳しくは下記をご覧ください。
ファームウェアを更新する
事前に
ファームウェアを更新する前に、その設定を保存しておきます。
左のメニューから「プリセット」を選びます。
そして上部に並ぶボタンから「バックアップを保存」をクリックします。
するとテキストファイルに設定値が保存されます。
または「CLIコマンドライン」画面で"diff all"と入力し、「ファイルへ保存」または「クリップボードにコピー」ボタンを使用して、表示された結果をテキストファイルに保存します。
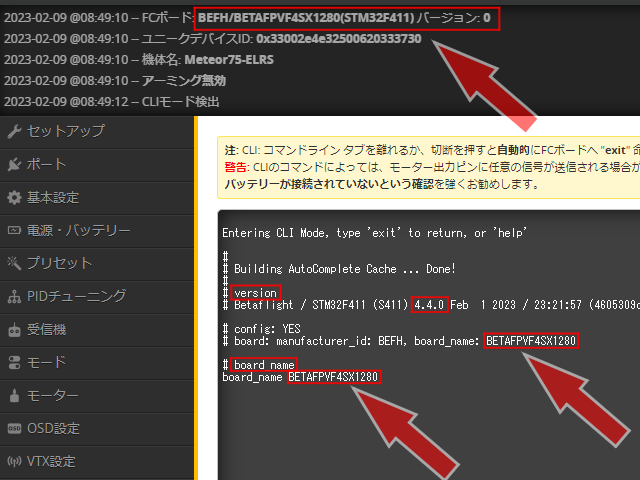 ファームウェアを書き込むターゲットFCボードの名前を確認しておきます。
ファームウェアを書き込むターゲットFCボードの名前を確認しておきます。
FCをパソコンに接続すると、画面左上のログに、FCボードの名前が表示されます。
または、CLIコマンド画面で"version"と入力すると、Betaflightのバージョンやボード名が表示されます。 CLIコマンド画面で"board_name"と入力すると、ボード名が表示されます。
あるいは CLI dump の先頭には version / board_name が採取されています。
 画面右上にある「Update Firmware」ボタンをクリックします。
このボタンは、ドローンをパソコンに接続していない状態でも押せます。
するとこのような「ファームフラッシャー」画面が開きます。
画面右上にある「Update Firmware」ボタンをクリックします。
このボタンは、ドローンをパソコンに接続していない状態でも押せます。
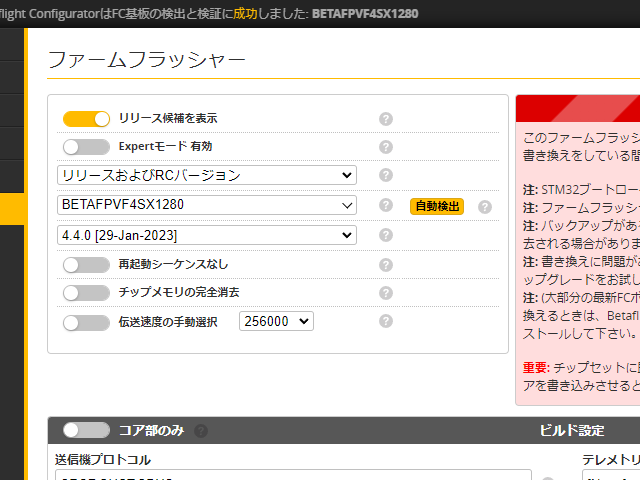
するとこのような「ファームフラッシャー」画面が開きます。
 ファームウェアをオンラインからダウンロードする場合
は、書き込みターゲットのFCボードの型番と、ファームウェアバージョンを選択します。
ファームウェアをオンラインからダウンロードする場合
は、書き込みターゲットのFCボードの型番と、ファームウェアバージョンを選択します。
パソコンとFCをUSBケーブルで接続していると、FCボードの選択メニューの右の[自動検出]ボタンが有効になります。 これをクリックすると、適合するファームウェアが自動的に選択されます。
そして画面右下の「ファームウェアを選択[Online]」をクリックします。 するとBetaflightオフィシャルサイトから、適合するファームウェアのダウンロードが始まります。
メーカーのWebサイトなどから入手したファームウェアを利用する場合 は、画面右下の「ファームウェアを選択[Local]」をクリックします。 すると、パソコンに保存したファームウェアファイルを指定することができます。
なお、Betaflightファームウェアの拡張子は".hex"です。
上の画面で「リリース候補を表示」をONにして、「リリースおよびRCバージョン」を選ぶと、RC(Release Candidate:リリース候補)版もリストに表示されます。 しかしRC版ファームウェアは評価中のバージョンであるため、バグを含んでいる可能性があります。 極力リリース版を使用してください。 また、FCのメーカーのWebサイトでは、製品にチューニング済みのRC版がダウンロードできる場合もあります。 RC版を使うときは、まずFCのメーカーのWebサイトを確認してください。
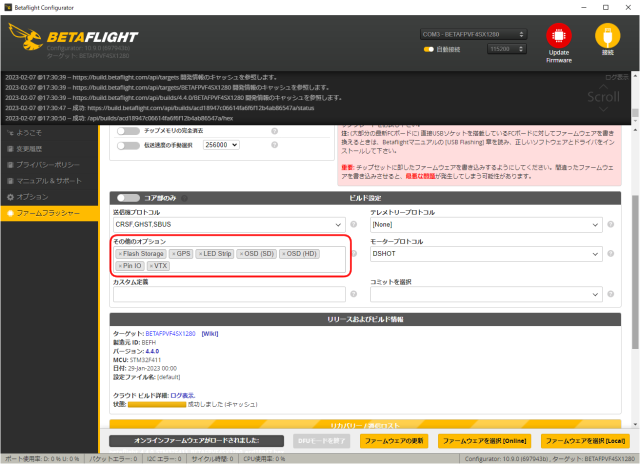 ファームウェアをダウンロードする前に、[ビルド設定]-[その他のオプション]欄で、ファームウェアに組み込む機能を追加/削除することができます。
不要な機能を削除すると、ファームウェアのサイズを小さくすることができます。
ファームウェアをダウンロードする前に、[ビルド設定]-[その他のオプション]欄で、ファームウェアに組み込む機能を追加/削除することができます。
不要な機能を削除すると、ファームウェアのサイズを小さくすることができます。
通常は、この項目は変更する必要はありません。 しかしもし、 ACRO TRAINERモード が使用したい場合は、その機能の追加が必要な場合があります。
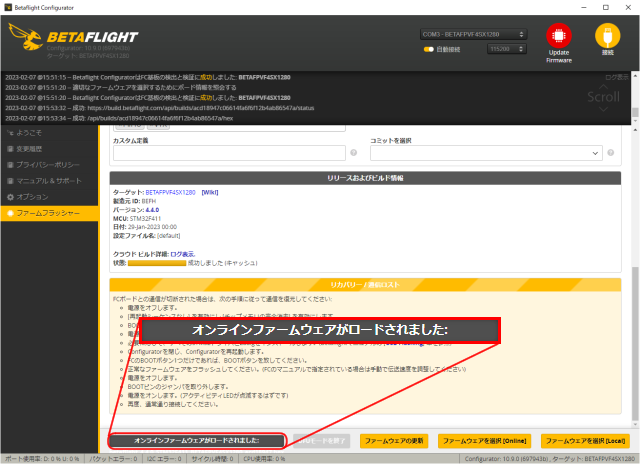 ファームウェアのダウンロードが完了すると、画面下部に「オンラインファームウェアがロードされました」と表示されます。
あとはドローン(FC)をパソコンに接続して、「ファームウェアの更新」ボタンをクリックすると更新が始まります。
ファームウェアのダウンロードが完了すると、画面下部に「オンラインファームウェアがロードされました」と表示されます。
あとはドローン(FC)をパソコンに接続して、「ファームウェアの更新」ボタンをクリックすると更新が始まります。
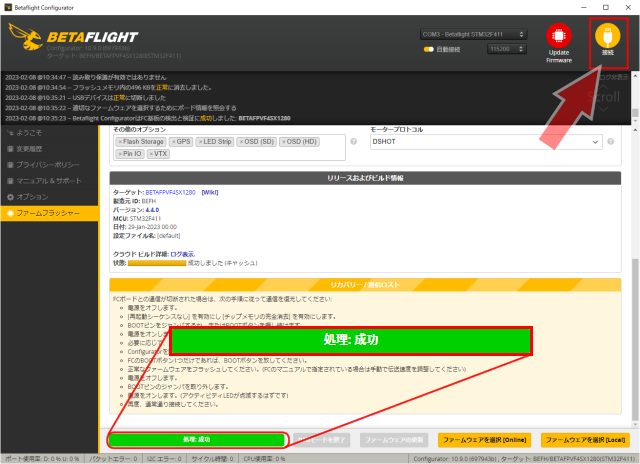 更新に成功すると、この図のように、画面下部に緑で「処理:成功」と表示されます。
つづいて画面右上の黄色い「接続」ボタンをクリックします。
更新に成功すると、この図のように、画面下部に緑で「処理:成功」と表示されます。
つづいて画面右上の黄色い「接続」ボタンをクリックします。
もし書き込みに失敗する場合は、後述の 書き込みに失敗する!? をご参照ください。
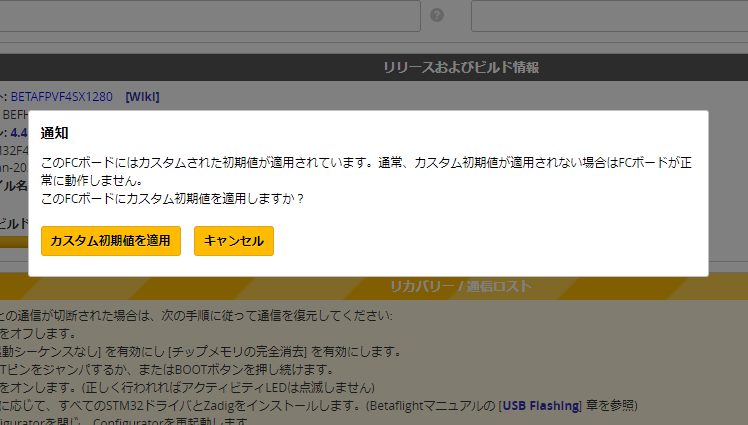 書き込んだファームウェアのバージョンによっては、このようなダイアログボックスが表示されます。
新しいバージョンで追加・変更された機能に対する初期値の設定が必要です。
「カスタム初期値を適用」をクリックします。
書き込んだファームウェアのバージョンによっては、このようなダイアログボックスが表示されます。
新しいバージョンで追加・変更された機能に対する初期値の設定が必要です。
「カスタム初期値を適用」をクリックします。
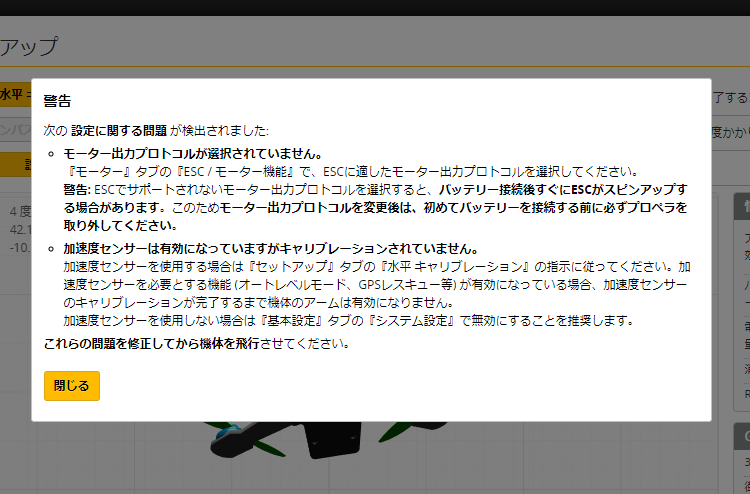 つづいて書き込んだファームウェアのバージョンによっては、このようなダイアログボックスが表示されます。
新しいバージョンで追加・変更された機能に対する設定・変更が必要です。
内容を確認したうえで「閉じる」をクリックします。
この画面をキャプチャしておいて、後で確認しましょう。
つづいて書き込んだファームウェアのバージョンによっては、このようなダイアログボックスが表示されます。
新しいバージョンで追加・変更された機能に対する設定・変更が必要です。
内容を確認したうえで「閉じる」をクリックします。
この画面をキャプチャしておいて、後で確認しましょう。
この図の例では、1番目の問題はCLI画面で "motor_pwm_protocol" を再設定(例:DSHOT300)することで解決します。 2番目の問題は「水平キャリブレーション」をやり直すことで解決します。
または、双方とも「設定値を元に戻す」(下記)と解決します。
FCのファームウェア更新が成功したら、事前に採取したバックアップデータをFCに書き戻します。
左のメニューから「プリセット」を選び、「バックアップデータをロード」をクリックします。
そして更新前に保存したテキストファイルを選択します。
または更新前に保存した"diff all"の結果をCLIコマンドラインに貼り付け、"save"コマンドでFCに書き込みます。
この後、特にエラーメッセージなど表示されなければ、ファームウェア更新完了です。
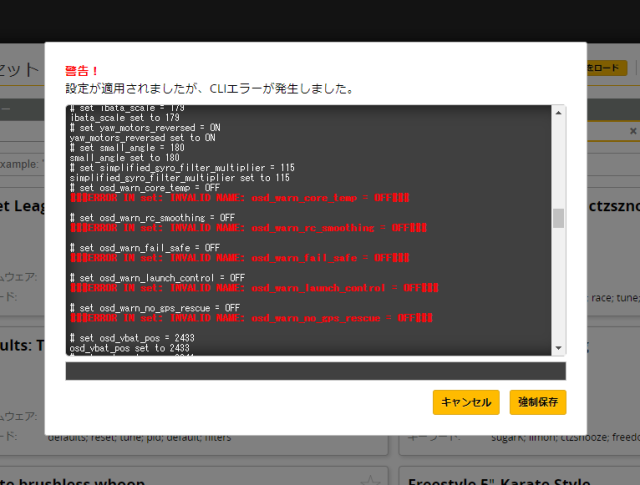 書き込んだファームウェアのバージョンによっては、このようなダイアログボックスが表示されます。
新しいバージョンで追加・変更された機能に対する設定・変更が必要です。
画面をスクロールして、赤字で表示されている部分の内容をチェックします。
書き込んだファームウェアのバージョンによっては、このようなダイアログボックスが表示されます。
新しいバージョンで追加・変更された機能に対する設定・変更が必要です。
画面をスクロールして、赤字で表示されている部分の内容をチェックします。
赤字で表示されている部分をキャプチャしておいて、後で確認しましょう。
「強制保存」をクリックして、通常の画面に戻ります。 そしてここまでに表示された各種警告の内容に従って、設定値の見直しを行ってください。
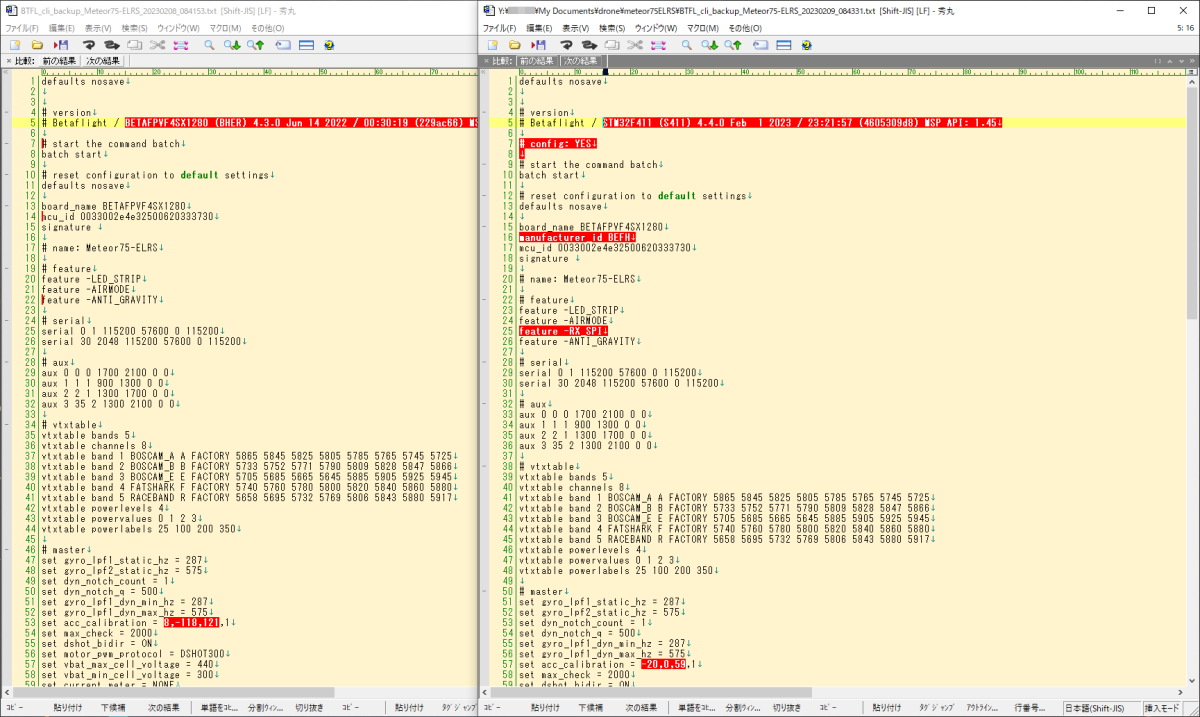 ファームウェア更新前に採取したバックアップ(または"diff all")と、更新後に採取したバックアップを比較すると、簡単に差異がチェックできます。
多くのテキストエディタには、図のように、二つのテキストファイルの差異を表示する機能があります。
バージョンアップに伴って追加/削除されたキーワードが、問題なく設定されていることを確認してください。
ファームウェア更新前に採取したバックアップ(または"diff all")と、更新後に採取したバックアップを比較すると、簡単に差異がチェックできます。
多くのテキストエディタには、図のように、二つのテキストファイルの差異を表示する機能があります。
バージョンアップに伴って追加/削除されたキーワードが、問題なく設定されていることを確認してください。
削除されたパラメーターは、多くの場合新バージョンで不要となったものです。無視してかまいません。
追加・変更されたパラメーターは、適切な値がセットされていることを確認してください。パラメーターの名称が変わっている場合は、正しい値が引き継がれていることを確認してください。
古いファームウェアに書き戻す
古いファームウェアに書き戻すには、「ファームフラッシャー」の画面で古いバージョンを選択してファームウェアを書き換えた後、そのときに採取した設定値のバックアップ(または"diff all")をロードすればOKです。 ドローン(FCボード)、そしてそのバージョンごとに、ファームウェアファイルと設定値のバックアップを保存しておくのがお勧めです。
書き込みに失敗する!?
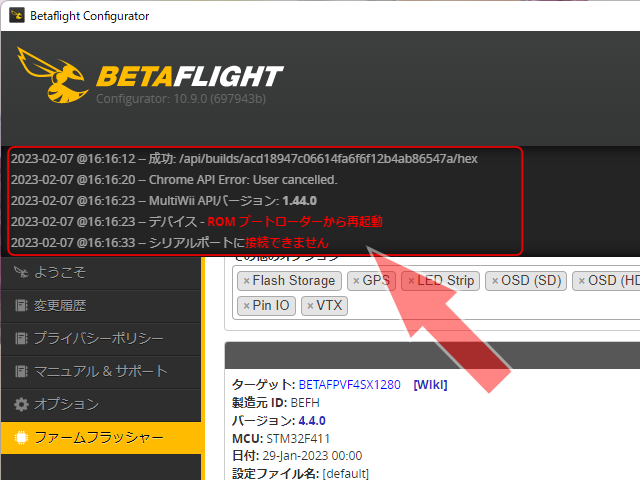 画面左上のログに赤字でエラーメッセージが表示されている場合は問題が発生している可能性があります。
ログを参考に問題解決してください。
画面左上のログに赤字でエラーメッセージが表示されている場合は問題が発生している可能性があります。
ログを参考に問題解決してください。
ここで 「シリアルポートに接続できません」というエラーメッセージが表示されたり、 「ブートローダーの再起動を開始しています...」を表示したままストールする場合は、 STM32 BOOTLOADER がパソコンに正しくインストールされているか確認してください。 あるいは ExpressLRS Configurator など、COMポートを使用する他のソフトウェアが同時に起動していないことを確認してください。
 あるいは、FCの接続しているCOMポートが、正しく選択されていることを確認してください。
あるいは、FCの接続しているCOMポートが、正しく選択されていることを確認してください。
スマートフォン/タブレットでドローンを調整する:SpeedyBeeを使う
SpeedyBeeというアプリを使うと、スマートフォン/タブレットで Betaflight 3.2.0, iNAV 2.0.0, EmuFlight 0.1.0 以降を搭載したドローンのパラメーター調整やファームウェア更新を行うことができます。 スマートフォン/タブレットとドローンは、下記の Speedy Bee Adapter または 「 Bluetooth-USB Adapter (SpeedyBee) 」、「 Bluetooth-UART Adapter (SpeedyBee) 」を使って、BluetoothまたはWi-Fi経由で接続します。 SpeedyBeeアプリの画面構成は、Betaflight Configuratorと同じです。 Betaflight Configuratorの使い方をマスターすれば、SpeedyBeeアプリも使うことができます。-
SpeedyBee App

Betaflight 3.2.0以降を搭載したドローンのフライトコントローラーの設定が可能なアプリです。 モバイル デバイスとフライト コントロール ボード間の通信は、Bluetooth または Wi-Fi を介して実現できます。 「Bluetooth-UART/USB Adapte」または「Speedy Bee Adapter」を使ってドローンと接続します。
詳細を見る(App Store) -
SpeedyBee Adapter 3 フライトコントローラーESCアクセサリー、ポータブルコンフィギュレーター&フラッシャー、ブラックボックスアナライザー、1S -6S LiPoチェッカー
SPEEDY BEE 2022/3/28 4500円
新しいSpeedyBeeアダプターは、ワイヤレスファームウェアフラッシャー/コンフィギュレーター、ブラックボックスアナライザー、ESCフラッシャー、1S-6SLiPoバッテリーチェッカーを1つに組み合わせたものです。 SpeedyBeeアプリに接続し、いつでもどこでもフライトコントローラーを構成します。または、フライトセッションのわずか2分前に最新バージョンのBetaflight/Emuflight/INAVをフラッシュします。



-
Speedy Bee Adapter 2 Betaflight設定ツール
Speedy Bee 2020-09-09 3,523円
この小さなアダプターだけで、Betaflight/INAV/Emuの全機能を利用可能です。外出中、ドローンの設定やファームウェアの更新などに最適です。 WiFi機能付き。スマホAPPで便利に操作できます。重いパソコンなどを持つ必要はなくなります。 XT60 & PH2.0バッテリーコネクター、1-6S入力をサポートします。
関連リンク集
Betaflight Configuratorの使い方については、下記のサイトが役に立ちます。もっとドローンのことを知りたい
もっとiPhoneのことを知りたい