マイクロドローン/FPVドローン/レーシングドローンのフライトモード Angle/Horizon/Acro/Air
マイクロドローン/FPVドローン/レーシングドローンのフライトモード Angle/Horizon/Acro/Air
Show this page in English
もくじ
マイクロドローン/FPVドローン/レーシングドローンのフライトモード
FPVドローンのフライトモードには、下記のような種類があります。 これは、ドローンのFC(Flight Controller)が、どのように操縦者を支援するかを示しています。(名称は、製品、搭載しているファームウェアや、その設定によって異なります)
| フライトモードの名称 | Angle (ANGL) Level Stab Sport Race_Angle |
Horizon (HOR) Race_Horizon |
Acro Rate Manual |
|---|---|---|---|
| スティックから指を離した時の挙動 | 水平を維持しようとする | その時の姿勢(角度)を維持しようとする | |
| スティックで制御されるもの |
姿勢(角度)。 スティックの角度に応じて姿勢(角度)を変化させる。 |
回転角速度。 スティックの角度に応じて、回転の速度が変わる。 |
|
| 使用するセンサー | ジャイロスコープと加速度計 | ジャイロスコープ | |
| 傾斜角度の制限 | あり | なし | |
| フリップ(宙返り)飛行 | 不可能 | 可能 | |
- 空撮用ドローンのようにSelf-leveling(自己安定)飛行を行う、Nモード/Normalモードを持っている商品もあります。 (例: BETAFPV Cetusシリーズ, DJI社のFPVドローンシリーズ)
- Angleモードで姿勢を維持するには、操縦者はスティックの角度を固定する必要があります。
- Acroモードで姿勢を維持するには、つねに操縦者がスティックの調整を行い続ける必要があります。
- Angleモードでは、傾斜角度が制限されているため、フリップ(宙返り)飛行ができません。
- Acro ( Rate / Manual ) モードで下記の「 Airモード 」を有効にしている場合には、OSD画面に「Acro」の代わりに「Air」と表示される場合があります。
- Betaflightファームウェアでは、フライトモードがなにも指定されていないときはAcroモードとなります。
- Silverwareファームウェアの Race_Angle ( RACE_A )、Race_Horizon ( RACE_H ) モードでは、ピッチ(エレベーター)のみAcroモードと同等の制御となります。 レーサーはもちろん、Angle / Horizon のユーザーが Acro 飛行への移行練習するのにも有効です。
なお、DJI社のFPVドローンシリーズでは、"Attitude Limit(姿勢制限)"が有効なMモードが Angle モードに、その制限を解除したMモードが Acro モードに相当します。
Acroモードの練習に便利: ACRO TRAINERモード
Betaflightファームウェアでは、AngleモードのユーザーがAcroモードを練習するのに便利な、ACRO TRAINERモードというものがあります。 これを有効にしてAcroモードで飛行すると、ロール、ピッチの角度が制限されるため、不用意に異常な姿勢になってしまうことが防げます。これを有効にするには、Betaflight Configuratorの「モード」画面でACRO TRAINERを有効にして任意のチャンネル(AUX)に割り当て、プロポでON/OFFします。 また角度の制限は、Betaflight ConfiguratorのCLIコマンド「acro_trainer_angle_limit」で指定します。 詳しくは Acro Trainer (Betaflight Wiki) で読めます。
なお、製品によっては、ACRO TRAINERモードを使用するにはFCのファームウェア更新(オプション機能の追加)が必要な場合があります。 もし項目"ACRO TRAINER"が表示されないときは、オプションを追加したファームウェア書き込んでください。 FCのファームウェア更新方法については 初心者のためのBetaflight Configuratorのインストールと使い方 をご覧ください。
Acro Trainer (Betaflight Wiki)
初心者のためのBetaflight Configuratorのインストールと使い方
ACRO TRAINERモードの設定方法
 Betaflight Configuratorを起動し、ドローンをUSBケーブルでパソコンに接続します。
「モード」画面を開き、ACRO TRAINERの「範囲追加」をクリックします。
Betaflight Configuratorを起動し、ドローンをUSBケーブルでパソコンに接続します。
「モード」画面を開き、ACRO TRAINERの「範囲追加」をクリックします。
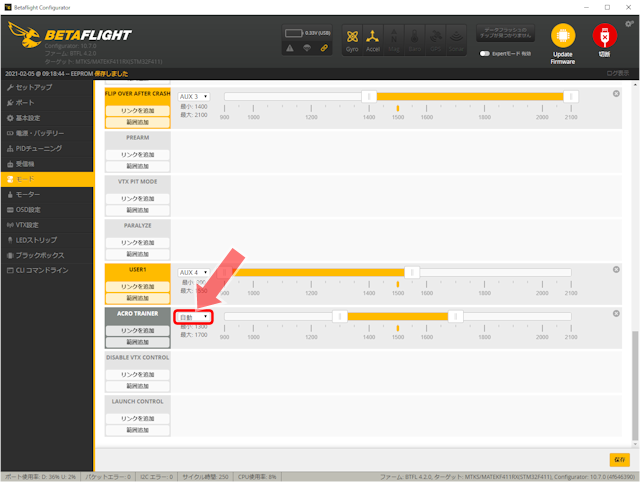 このようにパルスの範囲(1300-1700μsec)が追加されました。
つづいて「自動」と書かれているところをクリックして、任意のチャンネルを割り当てます。
このようにパルスの範囲(1300-1700μsec)が追加されました。
つづいて「自動」と書かれているところをクリックして、任意のチャンネルを割り当てます。
 今回はAUX5(チャンネル9)に割り当ててみました。
設定が済んだら、画面右下の「保存」をクリックすると、ドローンに反映されます。
今回はAUX5(チャンネル9)に割り当ててみました。
設定が済んだら、画面右下の「保存」をクリックすると、ドローンに反映されます。
今回、パルスの範囲が1300-1700μsecで有効となっているので、プロポでは3ポジションスイッチに割り当てると、スイッチを中央にしたときに有効になります。 飛行するときは、フライトモードでAcroを選んだうえで、ACRO TRAINERを有効にします。 OSD画面には、フライトモードが「ATRN」と表示されます。
| パラメーター | 初期値 | 意味 | 指定可能な範囲 |
|---|---|---|---|
| acro_trainer_angle_limit | 20 | 傾斜角度の制限(度) | 10 - 80(度) |
| acro_trainer_lookahead_ms | 50 | 高いジャイロレートで制限に近づいた場合に、オーバーシュートとバウンスバックを最小限に抑えるためにロジックが「先読み」するミリ秒単位の時間。 ほとんどのユーザーにとって、デフォルト値の50が適切です。 低出力または無反応の機体(マイクロまたはブラシ付き)の場合、かなりのオーバーシュートが見られる場合は、この設定を増やすと役立つ場合があります。 | 10 - 200(msec) |
| acro_trainer_debug_axis | ROLL | デバッグがアクティブな場合に情報をログに記録する軸 | ROLL, PITCH |
| acro_trainer_gain | 75 | 角度制限強度。 数値を大きくするとオーバーシュートを減らすことができますが、角度制限付近で振動が発生する可能性もあります。 デフォルト値の75は、ほとんどの状況でうまく機能するようです。 | 25 - 255 |
Airモードとは

例えば垂直降下(自由落下)するような場合はスロットルをゼロにしますが、この時空気抵抗や機体のバランスなどのために、機体があらぬ方向に回転してしまうことがあります。 Airモードでは、このような場合でもプロペラを回して(PID演算ループを続けて)、姿勢制御(姿勢維持)を行ってくれます。
Airモードの挙動の詳細については Modes (Betaflight WiKi) の「Airmode」の項に書かれています。
ただしAirモードを有効にすると、離着陸時のスロットルがゼロの時にも姿勢制御が働くため、離陸前にArmした直後や着陸後に、地上でドローンが飛び跳ねてしまう場合があります。 これを避けるには、Airモードは飛行中にのみONにします。 Betaflightのオフィシャルサイト (Betaflight WiKi) では、3ポジションスイッチを使い、[Disarm]-[Arm]-[Arm + Air mode]のように切り替えられるように、設定することが推奨されています。
What is Air Mode ? (Betaflight WiKi)
How do I enable Air Mode ? (Betaflight WiKi)
Betaflight Airmode (oscarliang)
Airモードを3ポジションスイッチに設定する方法 (Betaflightの場合)
ここではBetaflightファームウェアを搭載したドローンに於いて、Airモードを3ポジションスイッチに設定する方法を紹介します。
 Betaflight Configuratorを起動し、ドローンをUSBケーブルでパソコンに接続します。
「基本設定」画面を開き、「AIR MODE (エアモードを常時使用)」をオフにします。
そしてこの画面の右下の「保存して再起動」をクリックします。
Betaflight Configuratorを起動し、ドローンをUSBケーブルでパソコンに接続します。
「基本設定」画面を開き、「AIR MODE (エアモードを常時使用)」をオフにします。
そしてこの画面の右下の「保存して再起動」をクリックします。
 再度ドローンとBetaflight Configuratorを接続し、「モード」画面を開きます。
上の操作の結果、「モード」画面に「AIR MODE」が表示されているはずです。
「範囲追加」ボタンをクリックし、
チャンネルをArmと同じチャンネルに(ここではAUX1:CH5)、またパルスの範囲を1700-2100μsecにします。
再度ドローンとBetaflight Configuratorを接続し、「モード」画面を開きます。
上の操作の結果、「モード」画面に「AIR MODE」が表示されているはずです。
「範囲追加」ボタンをクリックし、
チャンネルをArmと同じチャンネルに(ここではAUX1:CH5)、またパルスの範囲を1700-2100μsecにします。
 同じく「モード」画面でArmの設定を確認します。
パルスの範囲は1700-2100μsecになっていると思います。これを1300-2100μsecに変更します。
そしてこの画面の右下の「保存」をクリックします。
以上でドローンの設定は完了です。
同じく「モード」画面でArmの設定を確認します。
パルスの範囲は1700-2100μsecになっていると思います。これを1300-2100μsecに変更します。
そしてこの画面の右下の「保存」をクリックします。
以上でドローンの設定は完了です。
あとはプロポでArmのチャンネル(ここではAUX1:CH5)に3ポジションスイッチを割り当てると完成です。 ドローンのフライトモードをACROにし、3ポジションスイッチを「中」にすると、フライトモードが「ACRO」の状態でArmされ、 スイッチを「上」にすると、Armされたままフライトモードが「AIR」に変わるはずです。
タートルモード(Turtle mode)
ドローンがひっくり返ってしまったときに、前後または左右のうち一方のプロペラを高速回転して起き上がる機能です。 この機能を搭載したドローンなら、わざわざ手で戻しに行かなくてもよくなります。 通常コントローラーのスイッチを操作してドローンをタートルモードに切り替え、スティックのエレベーターまたはエルロンを操作すると起き上がります。 この機能は“Flip Over After Crash”とも呼ばれます。ただしホイールベース65mmのドローンでは出力が小さいため、うまくフリップできない場合があります。
Silverwareファームウェアの場合
ドローンがひっくり返ったらDisarmし、タートルモードを有効にします。 するとOSD画面に「TURTLE」と表示されるので、Disarmしたままエレベーターまたはエルロンを操作すると起き上がります。 あとはArmすると飛行を続けることができます。
Betaflightファームウェアの場合
ドローンがひっくり返ったらDisarmし、Flip Over After Crashモードを有効にします。 その後ArmするとOSD画面に「CRASH FLIP」と表示されるので、エレベーターまたはエルロンを操作すると起き上がります。 つづいてDisarmし、Flip Over After Crashモードを無効にしたうえで再度Armすると飛行を続けることができます。
関連リンク集
Betaflight
Silverware wiki
NotFastEnuf / NFE_Silverware (GitHub)
Difference between Horizon, Angle, Acro and Air Mode (risingsunfpv)
Modes (Betaflight WiKi)
もっとドローンのことを知りたい
もっとiPhoneのことを知りたい