



 Flight Mode of FPV drone Angle/Horizon/Acro/Air
Flight Mode of FPV drone Angle/Horizon/Acro/Air
このページを日本語で見る
Table of contents
Flight Mode of FPV drone
There are following types of flight modes for FPV drone / Racing drone. This means how drone's FC (Flight Controller) assists pilot.(These names vary depending on products, installed firmware and its settings.)
| Flight Mode name | Angle (ANGL) Level Stab Sport Race_Angle |
Horizon (HOR) Race_Horizon |
Acro Rate Manual |
|---|---|---|---|
| Behavior when you take your finger off the stick | Trying to stay level | Trying to maintain attitude (angle) at that time | |
| What is controlled by the stick |
Attitude (angle): Attitude (angle) is changed according to the angle of the stick. |
Rotation angular velocity: Speed of rotation is changed according to the angle of the stick. |
|
| Sensor to use | Gyroscope and accelerometer | Gyroscope | |
| Tilt angle limit | Yes | No | |
| Flip (somersault) flight | Impossible | Possible | |
- Some products have an N mode/Normal mode that performs self-leveling flight like an aerial photography drone. (Example: BETAFPV Cetus series, DJI's FPV drones)
- To maintain attitude in Angle mode, pilot must fix angle of stick.
- To maintain attitude in Acro mode, pilot must constantly adjust stick.
- In Angle mode, flip (somersault) flight is not possible due to the limited tilt angle.
- If following " Air mode " is enabled in Acro ( Rate / Manual ) mode, "Air" may be displayed instead of "Acro" on OSD screen.
- In Betaflight firmware, if no flight mode is specified, it will be in Acro mode.
- In Race_Angle (RACE_A) and Race_Horizon (RACE_H) modes of Silverware firmware, only pitch (elevator) is controlled in the same way as in Acro mode. It's great for racers as well as Angle / Horizon users to practice the transition to Acro flight.
In DJI's FPV drones, M mode in which "Attitude Limit" is enabled corresponds to Angle mode, and M mode in which the limit is released corresponds to Acro mode.
Useful for practicing Acro mode: ACRO TRAINER mode
Betaflight firmware has ACRO TRAINER mode, which is convenient for Angle mode users to practice Acro mode. If you enable this and fly in Acro mode, roll and pitch angles will be limited, so you can prevent accidental attitude.To enable this, enable ACRO TRAINER on "Mode" screen of Betaflight Configurator, assign it to any channel (AUX), and turn it on / off with radio. The angle limit is specified by Betaflight Configurator CLI command "acro_trainer_angle_limit". You can read more about it on Acro Trainer (Betaflight Wiki) .
Depending on the product, it may be necessary to update the FC firmware (addition of optional functions) to use ACRO TRAINER mode. If the item "ACRO TRAINER" is not displayed, please write the firmware with the option added. Please refer to Installing and using Betaflight Configurator for beginners for FC firmware update method.
Acro Trainer (Betaflight Wiki)
Installing and using Betaflight Configurator for beginners
How to set ACRO TRAINER mode
 Launch Betaflight Configurator and connect drone to your computer with USB cable.
Open "Mode" screen and click "Add Range" in ACRO TRAINER.
Launch Betaflight Configurator and connect drone to your computer with USB cable.
Open "Mode" screen and click "Add Range" in ACRO TRAINER.
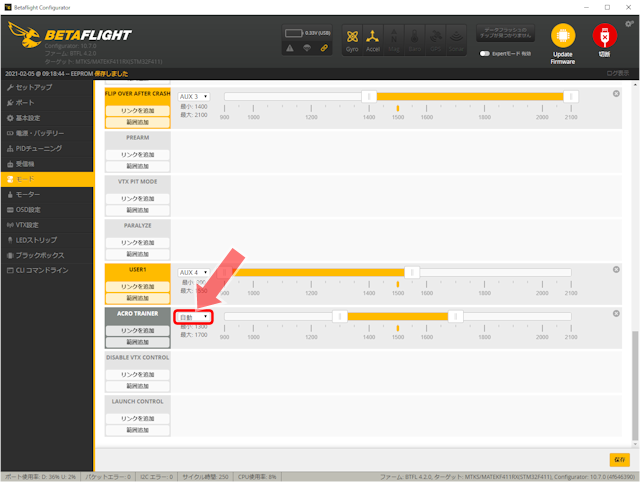 A pulse range (1300-1700μsec) has been added.
Then click where it says "Automatic" to assign any channel.
A pulse range (1300-1700μsec) has been added.
Then click where it says "Automatic" to assign any channel.
 This time I assigned it to AUX5 (channel 9).
After completing settings, click "Save" at the bottom right of the screen to reflect it on drone.
This time I assigned it to AUX5 (channel 9).
After completing settings, click "Save" at the bottom right of the screen to reflect it on drone.
This time, pulse range is valid at 1300-1700μsec, so if you assign it to 3-position switch in radio, it will be valid when the switch is centered. When practicing, select Acro in flight mode and enable ACRO TRAINER. The flight mode is displayed as "ATRN" on OSD screen.
Air mode

For example, in the case of vertical descent (free fall), throttle is set to zero, but at this time, aircraft may rotate in wrong direction due to air resistance and balance of the aircraft. In Air mode, even in such a case, propeller is turned (continuing PID operation loop) to control the attitude.
More details on the behavior of Air mode can be found in the "Air mode" section of Modes (Betaflight WiKi) page.
However, when Air mode is enabled, attitude control works even when the throttle is zero during takeoff and landing, so the drone may bounce on the ground immediately after arming before takeoff or after landing. To avoid this, Air mode should only be ON during flight. Betaflight's official site (Betaflight WiKi) recommends using a 3-position switch to set it so that it can be switched between [Disarm]-[Arm]-[Arm + Air mode].
What is Air Mode ? (Betaflight WiKi)
How do I enable Air Mode ? (Betaflight WiKi)
Betaflight Airmode (oscarliang)
How to set Air mode to 3-position switch (for Betaflight)
Here, we will introduce how to set the Air mode to the 3-position switch on a drone equipped with Betaflight firmware.
 Launch Betaflight Configurator and connect drone to your PC with USB cable.
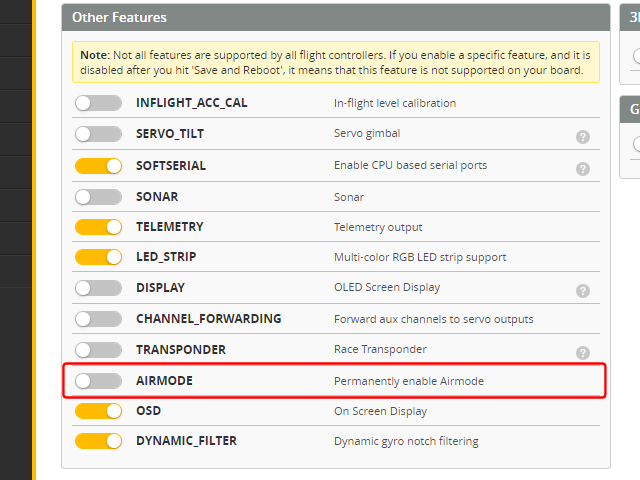
Open "Configuration" screen and turn off "AIR MODE (Permanently enable Airmode)".
Then click "Save and Reboot" at the bottom right of this screen.
Launch Betaflight Configurator and connect drone to your PC with USB cable.
Open "Configuration" screen and turn off "AIR MODE (Permanently enable Airmode)".
Then click "Save and Reboot" at the bottom right of this screen.
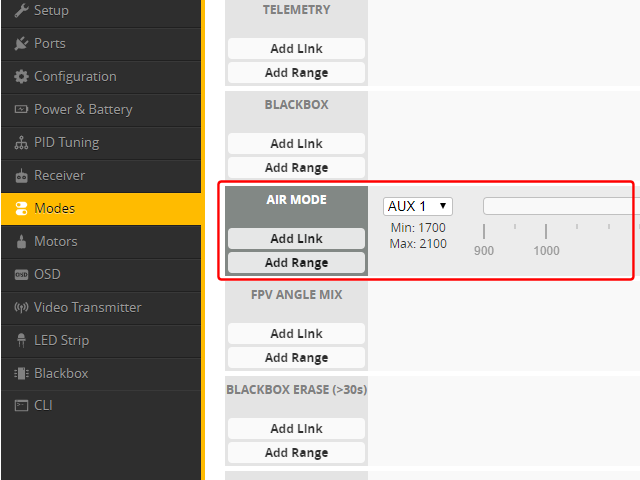 Connect drone and Betaflight Configurator again and open "Modes" screen.
As a result of above operation, "AIR MODE" should be displayed on "Modes" screen.
Click "Add Range" button.
Set channel to the same channel as Arm (here AUX1: CH5) and set pulse range to 1700-2100μsec.
Connect drone and Betaflight Configurator again and open "Modes" screen.
As a result of above operation, "AIR MODE" should be displayed on "Modes" screen.
Click "Add Range" button.
Set channel to the same channel as Arm (here AUX1: CH5) and set pulse range to 1700-2100μsec.
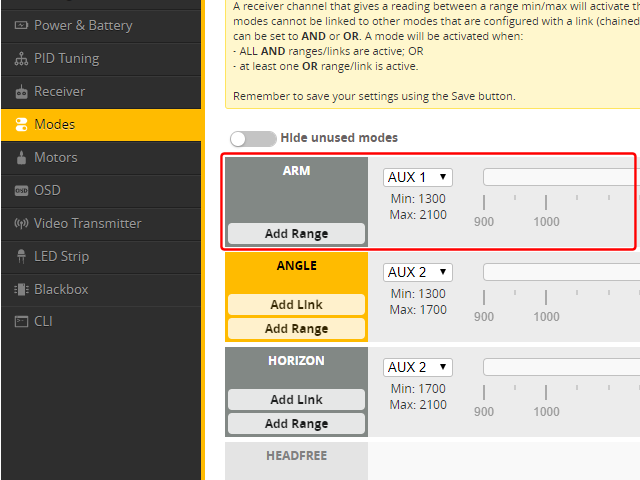 Also check "Arm" setting on "Modes" screen.
pulse range seems to be set to 1700-2100μsec. Change this to 1300-2100μsec.
Then click "Save" at the bottom right of this screen.
Drone setup is now complete.
Also check "Arm" setting on "Modes" screen.
pulse range seems to be set to 1700-2100μsec. Change this to 1300-2100μsec.
Then click "Save" at the bottom right of this screen.
Drone setup is now complete.
After that, assign a 3-position switch to "Arm" channel (AUX1: CH5 in this case) with radio, and you're done. When flight mode of drone is set to ACRO and 3-position switch is set to "center", Arm is performed with flight mode set to "ACRO". When the switch is turned "up", flight mode should change to "AIR" while still armed.
Turtle mode
When the drone is turned over, it is a function to get up by rotating one of the front and rear or left and right propellers at high speed. With a drone equipped with this feature, you don't have to turn over by hand. Normally, you can operate the switch on the controller to switch the drone to turtle mode and operate the elevator or aileron on the stick to get up. Also known as “Flip Over After Crash”.However, a drone with a wheelbase of 65 mm has a small output, so it may not be able to flip well.
In Silverware firmware
Disarm drone when it flips over and enable "Turtle" mode. Then, "TURTLE" is displayed on OSD screen, so if you operate elevator or aileron with Disarm, the drone will get up. After that, you can continue flying by enabling Arm.
In Betaflight firmware
Disarm drone when it flips over and enable "Flip Over After Crash" mode. After that, when Arming, "CRASH FLIP" is displayed on OSD screen, so if you operate elevator or aileron with Arm, the drone will get up. Then disarm, disable Flip Over After Crash mode, and then Arm again to continue flight.
Related links
Betaflight
Silverware wiki
NotFastEnuf / NFE_Silverware (GitHub)
Difference between Horizon, Angle, Acro and Air Mode (risingsunfpv)
Modes (Betaflight WiKi)
To know more about How to Fly Hobby Drone
To know more about iPhone














