MODEL TELEMETRY画面の解説 / テレメトリーの使い方
MODEL TELEMETRY画面の解説 / テレメトリーの使い方
ここではOpenTX/EdgeTXプロポのTELEMETRY画面の使い方を解説します。
Show this page in English
もくじ
MODEL TELEMETRY画面の機能
MODELメニューにあるTELEMETRY画面は、受信機(機体)から送られてくる各種テレメトリーデータ(現在のバッテリー電圧・電流、モーター回転数、温度など、センサーの計測値)を読み取るのに使用します。 テレメトリーデータのうち、どのデータを読み取るのか、またログに記録するのかを決めて、MODEL情報に登録します。 また、読み取ったテレメトリーデータを使ってプロポ上で計算を行い、それを新たなテレメトリー値として登録することもできますTELEMETRY画面で登録したテレメトリーデータは、 DISPLAY画面 を使って、操縦中にカスタムテレメトリー画面に表示させることができます。 また、 スペシャルファンクション/グローバルファンクション を使って、ログファイルに保存することができます。
MODEL TELEMETRY画面の解説
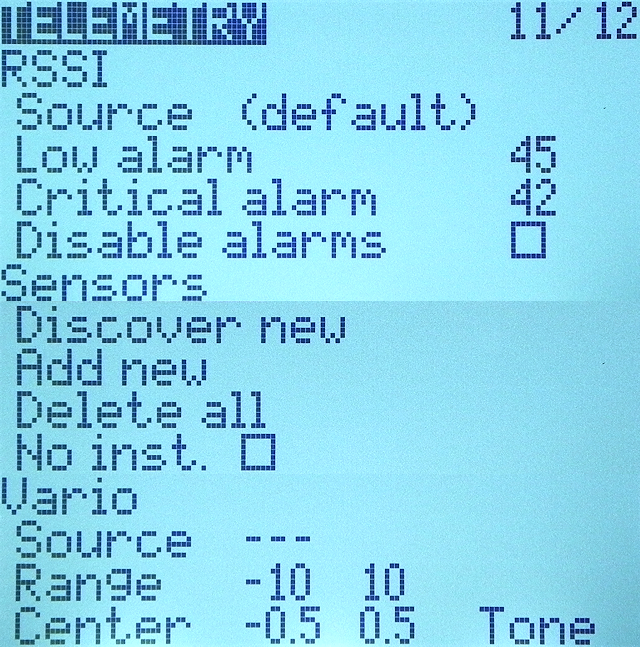 「MODELメニュー」から「TELEMETRY」画面を開くと、この図のようになります。
この画面は大きく「RSSI」欄、「Sensors」欄、「Vario」欄の3つに分かれています。
「MODELメニュー」から「TELEMETRY」画面を開くと、この図のようになります。
この画面は大きく「RSSI」欄、「Sensors」欄、「Vario」欄の3つに分かれています。
「RSSI」欄では、RSSI(Receiver Signal Strength Indicator:受信している信号の強度)に関するアラームが設定できます。
「Sensors」欄では、機体に搭載されているテレメトリーセンサーの検出、設定ができます。
「Vario」欄では、操縦する機体にその上昇、下降を検知するVariometerを搭載しているときに、その設定ができます。 Variometerはラジコングライダーなどで使用されます。
 なお、カラーディスプレイ/タッチパネルモデルでも同様に設定できます。
なお、カラーディスプレイ/タッチパネルモデルでも同様に設定できます。
RSSIアラームの設定
RSSIの値は、最も受信状況が良いとき、例えば送信機と受信機が十分に近いときは100(db)となります。 そして送信機と受信機の距離が2倍になる毎に6(db)ずつ低下します。 通常、コントロール不能になるのは約38(db)以下となった時です。OpenTX/EdgeTXでは、[Low alarm]には45(db)、[Critical alarm]には42(db)を設定することを推奨しています。 このため、例えば送信機と受信機の距離が1000mの時に[Critical alarm]が聞こえた場合には、コントロール不能になるのは約1500m離れた場合と考えられます。
ただし、RSSIの値から送信機と受信機の距離を求めることはできません。 あくまで参考値として使用してください。
RSSI信号に関する詳しい説明は、OpenTXオフィシャルサイトの Telemetry Values のページで読めます。
Telemetry Values (OpenTX)
RSSI欄の各設定項目の意味は下記のとおりです。
| 項目 | 日本語 | 説明 |
|---|---|---|
| Source | 信号元 | RSSIとして扱うセンサーを指定します。 通常は"default"に固定されており、変更できません。 |
| Low alarm | 低アラーム | RSSIの値が、ここで指定した値を下回るときに「RF signal low」警告が鳴動します。 通常ここには45(db)をセットします。 |
| Critical alarm | クリティカルアラーム | RSSIの値が、ここで指定した値を下回るときに「RF signal critical」警告が鳴動します。 通常ここには42(db)をセットします。 |
| Disable alarms | テレメトリー音声警告を無効 | ここにチェックを入れると、RSSI警告を通知しません。 この場合は、プロポの起動時に「RSSI WARNING」という警告画面が表示されます。 |
Variometerアラームの設定
Variometerは、機体の高度の変化を、上昇率・下降率(単位はメートル/秒またはフィート/秒)として検出します。 そしてOpenTX/EdgeTXでは、この上昇率・下降率の変化を、アラームの音程の変化として通知します。 実際にどの周波数の音を鳴らすかは、 RADIO SETUP画面 のVariometerメニューで設定します。
RADIO SETUP設定項目の解説
Vario欄の各設定項目の意味は下記のとおりです。
| 項目 | 日本語 | 説明 |
|---|---|---|
| Source | バリオ元値 | Variometerとして扱うセンサーを指定します。 Sensors欄に登録したテレメトリーセンサーの中から選びます。 |
| Range | Sink最大 / クライム最大 | Variometerアラームの、音程を変化させる範囲を指定します。 上昇率・下降率がここで指定した範囲内であれば、その値に従ってアラームの音程が変化します。 ここで指定した範囲を超えてしまったときは、アラームの音程は変化しなくなります。 単位はメートル/秒またはフィート/秒です。 |
| Center | Sink最小 / クライム最小 | 上昇率・下降率の変化を無視する範囲を指定します。 上昇率・下降率がここで指定した範囲内の時は、アラームの音程は変化しません。 Variometerの中央値の値のブレを吸収するために設定します。 このため通常[Center]で指定する範囲は、[Range]で指定する範囲の中に納まっています。 単位はメートル/秒またはフィート/秒です。 |
| Tone/Silent | センター サイレント | 上昇率・下降率が[Center]で指定した範囲内にある時に、アラームを鳴らすか否かを指定します。 |
テレメトリーデータの設定
Sensors欄では、機体から得られるテレメトリーデータの設定を行います。Sensors欄の各設定項目の意味は下記のとおりです。
| 項目 | 説明 |
|---|---|
| Discover New | ここにカーソルを合わせて[ENTER]キーを押すと、 バインドしている受信機(機体)から送られてくるテレメトリーデータを自動的に検出し、MODEL情報に登録します。 このメニューは、受信機の電源を投入し、プロポとバインドしている状態で操作します。 |
| Add New | ここにカーソルを合わせて[ENTER]キーを押すと、 テレメトリーセンサーの登録画面を開きます。 手動でテレメトリーセンサーを登録できます。 |
| Delete All | ここにカーソルを合わせて[ENTER]キーを押すと、 検出・登録済みのすべてのテレメトリーセンサーを、MODEL情報から削除します。 |
| No inst. (No Instances) / Ignore instances |
ここにチェックを入れると、同一のテレメトリーデータが、異なる複数のセンサーの出力(インスタンス)として通知されてしまう場合に、これを解消します。
この問題はセンサーのソフトウェアの不具合であり、通常この機能が必要になることはありません。
OpenTX/EdgeTX Companionの「テレメトリー」画面では、この項目は「マルチセンサーハンドリング無効(disable multi sensor handling)」と書かれています。 |
テレメトリーセンサーを自動検出する
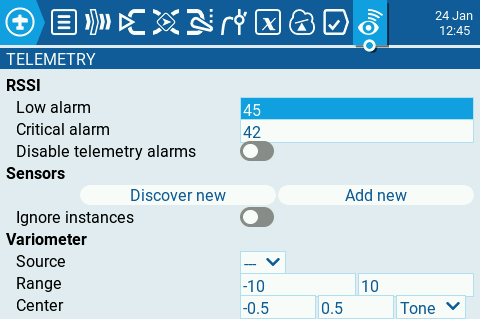
 受信機(機体)とプロポをバインドしている状態で「Sensors」欄の[Discover New]にカーソルを合わせて[ENTER]キーを押します。
するとこの図のように、受信機から、テレメトリーセンサーの情報が読み込まれます。
受信機(機体)とプロポをバインドしている状態で「Sensors」欄の[Discover New]にカーソルを合わせて[ENTER]キーを押します。
するとこの図のように、受信機から、テレメトリーセンサーの情報が読み込まれます。
各センサーの値が更新されたタイミングで、センサー値の右に「*」マークが点滅します。 更新頻度の多いセンサーでは、「*」マークが点きっぱなしになります。
一旦読み込まれたセンサー名は、MODEL情報に保存されます。 これらセンサーの値は、 DISPLAY画面 を使って、操縦中にカスタムテレメトリー画面に表示させることができます。
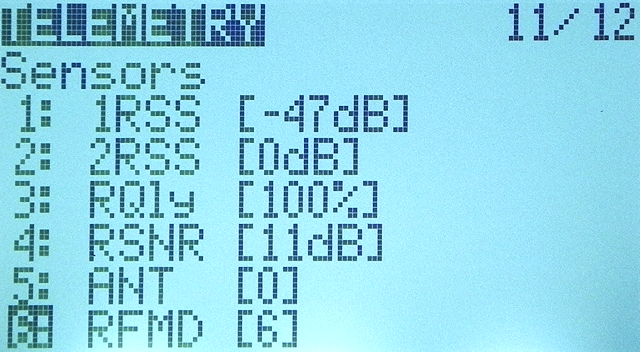 受信機との通信が途絶えると、あるいは何らかの理由でテレメトリーセンサーの情報が更新されないと、その値は“[]”(カギカッコ)で囲まれます。
受信機との通信が途絶えると、あるいは何らかの理由でテレメトリーセンサーの情報が更新されないと、その値は“[]”(カギカッコ)で囲まれます。
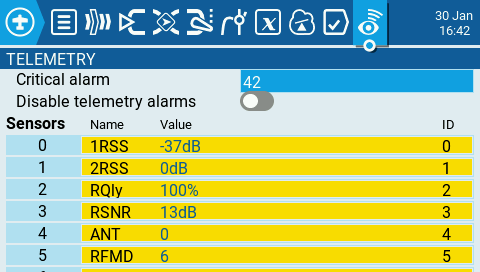 なお、カラーディスプレイ/タッチパネルモデルでも同様に設定できます。
各センサーの値が更新されたタイミングで、センサー名の右に「●」マークが点滅します。 更新頻度の多いセンサーでは、「●」マークが点きっぱなしになります。
なお、カラーディスプレイ/タッチパネルモデルでも同様に設定できます。
各センサーの値が更新されたタイミングで、センサー名の右に「●」マークが点滅します。 更新頻度の多いセンサーでは、「●」マークが点きっぱなしになります。
一旦読み込まれたセンサー名は、MODEL情報に保存されます。 これらセンサーの値は、 ウィジェット を使って、操縦中にメイン画面に表示させることができます。
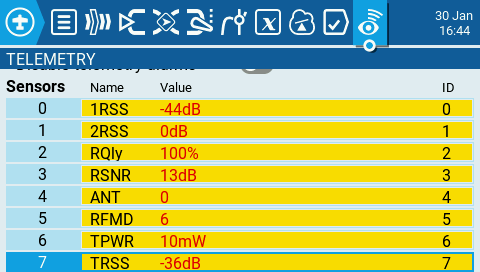 受信機との通信が途絶えると、あるいは何らかの理由でテレメトリーセンサーの情報が更新されないと、その値は赤色に変わります。
受信機との通信が途絶えると、あるいは何らかの理由でテレメトリーセンサーの情報が更新されないと、その値は赤色に変わります。
テレメトリーセンサーを手動で登録する
 「Sensors」欄の[Add New]にカーソルを合わせて[ENTER]キーを押します。
するとこの図のようになります。
この画面の各項目を入力すると、テレメトリーセンサーを手動で登録することができます。
センサーを手動で登録する場合は、受信機とプロポをバインドする必要はありません。
「Sensors」欄の[Add New]にカーソルを合わせて[ENTER]キーを押します。
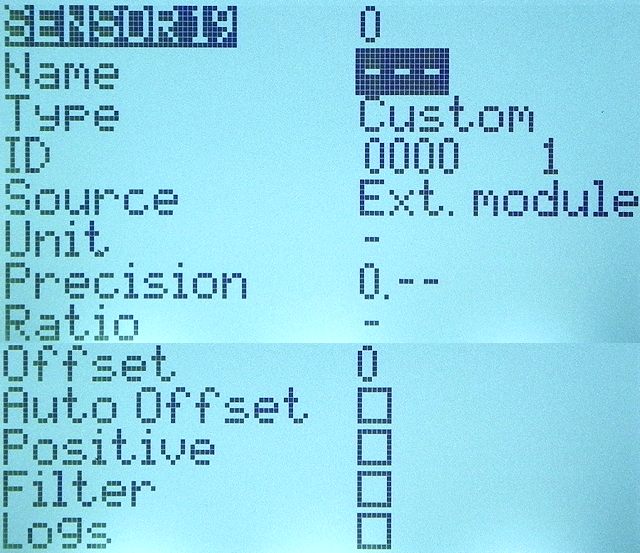
するとこの図のようになります。
この画面の各項目を入力すると、テレメトリーセンサーを手動で登録することができます。
センサーを手動で登録する場合は、受信機とプロポをバインドする必要はありません。
登録できるセンサーのタイプには[Custom]と[Calculated]の2種類があります。 これらの差異については、下表の「Type」欄をご覧ください。
これは[Type]欄に[Custom]を選んだ場合の画面です。
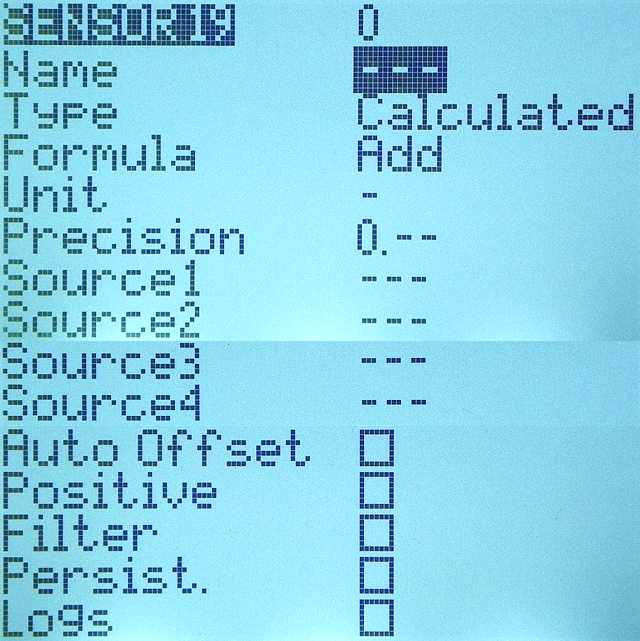 [Type]欄に[Calculated]を選んだ場合は、このような画面になります。
各フィールドの意味は、下記の表に示す通りです。
[Type]欄に[Calculated]を選んだ場合は、このような画面になります。
各フィールドの意味は、下記の表に示す通りです。
| 項目 | 日本語 | 説明 |
|---|---|---|
| Name | - | センサーの名前を指定します。 4文字以内の英数字、空白、ハイフンで入力します。 |
| Type | - |
センサーのタイプを指定します。
[Custom(カスタム)]または[Calculated(計算値)]が指定できます。
[Custom]を選ぶと、[Discover New]機能で自動登録されないハードウェアセンサーを、手動で定義できます。 [Calculated]を選ぶと、他のセンサーの値を使って、計算で求めるセンサーを定義できます。例えば電圧センサーと電流センサーの値を乗算して、電力を表示するセンサーを設定することができます。 |
| ID | ID / インスタンス |
これはどのようなセンサーなのかを示すID番号で、センサーごとに決められた値を指定します。
これは2つの値から成ります。
一つ目はID番号を指定する4桁の数字で、二つ目はインスタンス番号を指定する1桁の数字です。 ID番号はセンサーのタイプごとに定義されています。 インスタンス番号はセンサーのハードウェアごとに定義されています。 同じタイプ(ID番号)のセンサーを複数接続した場合は、それらを区別するために、ハードウェアごとにインスタンス番号を変える必要があります。 センサーのインスタンス番号を変えるには、センサーに"Sensor ID Changer"という機器を接続する必要があります。 |
| Source | - | 使用する送信機(Int.(内蔵)/Ext.(外付け))が表示されます。 ユーザーが変更することはできません。 |
| Unit | - | 単位を指定します。センサーの値を画面に表示するとき、あるいは音声で読み上げるときに、この単位が付加されます。 |
| Precision | 精度 |
センサーの値を画面に表示するときの、小数点以下の桁数を指定します。
[0.–-]:小数点以下は切り捨て。 [0.0]:小数点以下1桁を表示。2桁以降は切り捨て。 [0.00]:小数点以下2桁を表示。3桁以降は切り捨て。 |
| Ratio | レシオ | センサーの値に乗算する"比率"値を指定します。 一部のセンサーでは、正しい値を読み取るのに、特定の"比率"値を乗算する必要があります。 |
| Offset | オフセット | センサーの値に加算する"オフセット"値を指定します。 画面に表示されるセンサーの値には、ここで指定した"オフセット"値が加算されます。 |
| Auto Offset | 自動オフセット | ここにチェックを入れると、センサーの値から、センサーの初期値を減算します。 例えば海抜を読み取る高度センサーに対してこれをセットすると、離陸地点からの相対的な高度が表示できます。 |
| Positive | ノーマル | ここにチェックを入れると、センサーの値が正の数の時のみ、その値を表示します。 センサーの値が負の数になった時は、ゼロを表示します。 |
| Filter | フィルター | ここにチェックを入れると、センサーの値を平滑化します。 最近のセンサーの値の平均値を表示します。 |
| Logs | ログ | ここにチェックを入れると、このセンサーの値がログファイルに保存されます。 ログ採取の設定は スペシャルファンクション/グローバルファンクション の"SD Logs"アクションで行います。 |
| Formula | - | [Calculated]タイプのセンサーの、計算式を指定します。 詳しくは Calculatedセンサーの計算式 をご覧ください。 |
| Source1, 2, 3, 4 | - | [Calculated]タイプのセンサーの、計算に使用する引数を指定します。 |
| Persist. (Persistent) | 持続 | ここにチェックを入れると、モデルの切り替え時、あるいはプロポの電源を落とすときにセンサー値を保存し、再度そのモデルで飛行するときに、保存されていた値を復元します。 |
Calculatedセンサーの計算式
Calculatedタイプのセンサーでは、以下の計算式が指定できます。 なお、引数は"Source1, 2, 3, 4"欄で指定します。 引数は、Sensors欄に登録したテレメトリーセンサー、およびその符号反転値の中から選びます。 ただし選択する計算式によっては、計算式固有の引数の指定が必要です。| 計算式 | 日本語 | 説明 |
|---|---|---|
| Add | 追加 | 複数のセンサーの値を加算します。 最大4つの値を入力できます。 |
| Average | 平均 | 複数のセンサーの値の平均値を求めます。 最大4つの値を入力できます。 |
| Minimum | 最低値 | 複数のセンサーの値の最小値を求めます。 最大4つの値を入力できます。 |
| Maximum | 最大値 | 複数のセンサーの値の最大値を求めます。 最大4つの値を入力できます。 |
| Multiply | 乗算 | 2つのセンサーの値を乗算します。 |
| Totalize | 合計 | 1つのセンサーの値を累計加算します。 |
| Cell | セル |
FrSKY Lipoバッテリーセンサーのための計算式です。
"Cell index"欄の数値で指定したセルの、電圧を表示します。 "Cell index"欄に"Lowest"を指定すると、電圧が最も低いセルの電圧を表示します。 "Cell index"欄に"Highest"を指定すると、電圧が最も高いセルの電圧を表示します。 "Cell index"欄に"Delta"を指定すると、電圧が最も低いセルと最も高いセルの間の電圧差を表示します。 |
| Consumpt (Consumption) | 消費 | 電流センサーの値を累計加算して、消費電力(mAh)を求めます。 |
| Distance | 距離 | GPSセンサーと高度計の値を使って、受信機(機体)とプロポ(パイロット)の間の距離を求めます。 |
テレメトリーデーターを編集する/個別に削除する
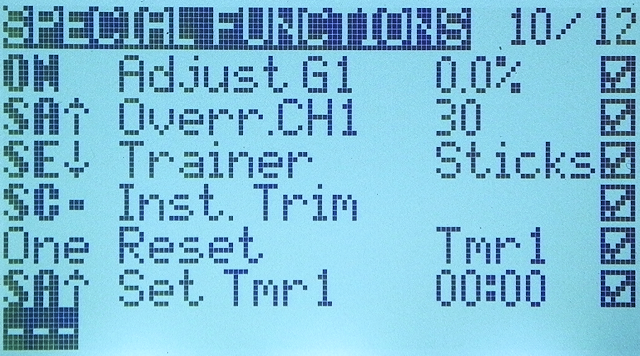
 TELEMETRY画面のSensors欄に登録されているテレメトリーデーターの名前にカーソルを合わせて、[ENTER]キーを長押しすると、このようなメニューが表示されます。
TELEMETRY画面のSensors欄に登録されているテレメトリーデーターの名前にカーソルを合わせて、[ENTER]キーを長押しすると、このようなメニューが表示されます。
[Edit]を選ぶと、そのテレメトリーデーターの設定を編集できます。
[Copy]を選ぶと、そのテレメトリーデーターの設定がコピーできます。
[Delete]を選ぶと、そのテレメトリーデーターの設定を削除できます。
テレメトリーデーターをリセットする
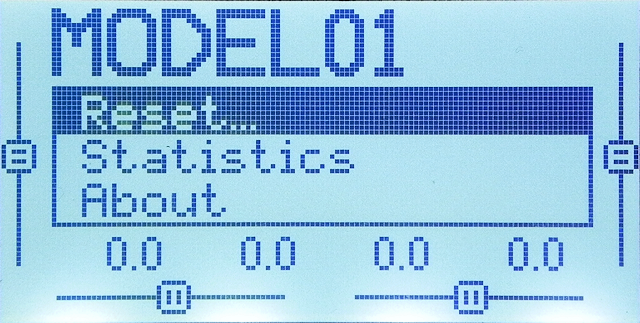 メイン画面で[ENTER]キーを長押しすると表示されるメニューから、テレメトリーデーターをリセットすることができます。
メイン画面で[ENTER]キーを長押しすると表示されるメニューから、テレメトリーデーターをリセットすることができます。
モノクロモデルでは、ここで[Reset]メニューを選択するとさらにサブメニューが表示されます。 サブメニューで[Reset telemetry]メニューを選ぶと、すべてのテレメトリーを一括でリセットします。 サブメニューで[Flight]メニューを選ぶと、すべての タイマー とテレメトリーを一括でリセットします。
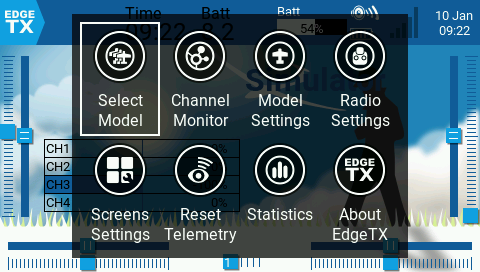 カラーディスプレイ/タッチパネルモデルの場合は、メイン画面でトップバーをタップ(タッチパネルモデル)または[ENTER]キーをクリックすると、このようなメニュー(メインナビケーションメニュー)が表示されます。
メニューから[Reset Telemetry]を選ぶとさらにサブメニューが表示されます。
カラーディスプレイ/タッチパネルモデルの場合は、メイン画面でトップバーをタップ(タッチパネルモデル)または[ENTER]キーをクリックすると、このようなメニュー(メインナビケーションメニュー)が表示されます。
メニューから[Reset Telemetry]を選ぶとさらにサブメニューが表示されます。
サブメニューで[Reset telemetry]を選ぶと、すべてのテレメトリーを一括でリセットします。 [Reset Flight]を選ぶと、タイマーとテレメトリーを一括でリセットします。
 あるいは
スペシャルファンクション/グローバルファンクション
の"Reset"アクションを使うと、テレメトリーデーターをリセットすることができます。
スイッチなどの操作でリセットできます。
あるいは
スペシャルファンクション/グローバルファンクション
の"Reset"アクションを使うと、テレメトリーデーターをリセットすることができます。
スイッチなどの操作でリセットできます。
Special Functions / Global Functions の使い方
もっとドローンのことを知りたい
もっとiPhoneのことを知りたい