モデルの新規作成 / パソコンで設定する場合
モデルの新規作成 / パソコンで設定する場合

OpenTX/EdgeTXを採用しているプロポであれば、どれでも同様の操作が可能です。 ただしキースイッチの割り当て/機能は機種によって異なり、画面/メニュー構成はインストールされているOpenTX/EdgeTXのバージョンによって異なります。
Show this page in English
もくじ

-
RadioMaster Zorro 2.4GHz 16CH ホールジンバル

RadioMaster 2022/02 9,411円
搭載ファームウェア:EdgeTX(OpenTX)
人間工学に基づいたデザイン、完璧な表示位置にある大きな明るいLCDスクリーン、トラベル調整可能なHALLセンサージンバル、ナノサイズの外部RFモジュールベイを備えています

 (JP)
(US)
(JP)
(US)

 RadioMaster Zorroの使い方
RadioMaster Zorroの使い方
「モデル」入力エリアを新規登録
パソコンでモデルを作成する場合は、プロポからモデルの情報を読み出し、OpenTX/EdgeTX Companion上で作成・編集し、これをプロポに書き戻します。 プロポに格納されている最大60機分のモデル情報は、パソコン上では一つの".otx"形式のバイナリファイルとして管理されます。 パソコン上で複数の".otx"形式ファイルを作成して、必要に応じてプロポに転送する、といった管理も可能です。 こうすれば、一つのプロポで無限の数のモデル情報を使用することができます。
OpenTX Companionのインストール方法
EdgeTX Companionのインストール方法
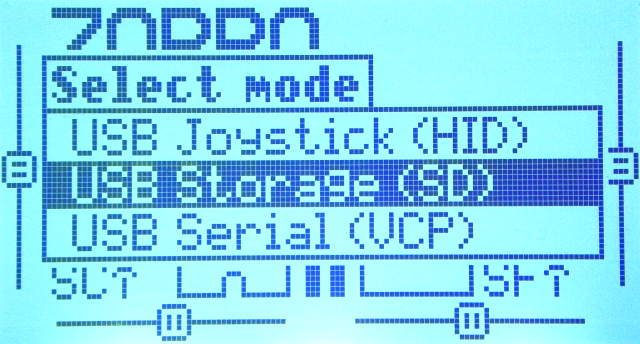 プロポの電源を入れてUSBケーブルでパソコンに接続すると、このようなメニューが表示されます。
モデルを作成・編集するには「USB Storage(SD)」を選びます。
そしてしばらく(20-30秒ほど)待つと、パソコンのエクスプローラーに「ESD-USB」または「USBドライブ」と「Taranis」あるいは「(あなたのプロポの名前)」という2つのドライブがマウントされます。
プロポの電源を入れてUSBケーブルでパソコンに接続すると、このようなメニューが表示されます。
モデルを作成・編集するには「USB Storage(SD)」を選びます。
そしてしばらく(20-30秒ほど)待つと、パソコンのエクスプローラーに「ESD-USB」または「USBドライブ」と「Taranis」あるいは「(あなたのプロポの名前)」という2つのドライブがマウントされます。
 OpenTX/EdgeTX Companionを起動します。
そして画面の左に並ぶアイコンの、上から2番目「送信機から機体モデルや設定を読み込み」をクリックします。
するとプロポに保存されているモデル情報などが、パソコンのOpenTX/EdgeTX Companionに読み込まれます。
OpenTX/EdgeTX Companionを起動します。
そして画面の左に並ぶアイコンの、上から2番目「送信機から機体モデルや設定を読み込み」をクリックします。
するとプロポに保存されているモデル情報などが、パソコンのOpenTX/EdgeTX Companionに読み込まれます。
なお、ここでメニューから[ファイル]-[新規]を選ぶと、全く新しい".otx"形式ファイルを作ることができます。 また[ファイル]-[開く]を選ぶと、パソコンに格納済みの".otx"形式ファイルを読み込むことができます。
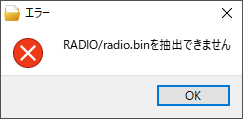 プロポから設定を読み込むときに、図のような「RADIO/radio.binを抽出できません」というエラーが表示される場合があります。
あなたのプロポが最近発売された製品で、まだOpenTX/EdgeTX Companionが対応していない場合に、このようなエラーが表示されることがあります。
その場合は、OpenTX/EdgeTX Companionのバージョンアップを待ってください。
プロポから設定を読み込むときに、図のような「RADIO/radio.binを抽出できません」というエラーが表示される場合があります。
あなたのプロポが最近発売された製品で、まだOpenTX/EdgeTX Companionが対応していない場合に、このようなエラーが表示されることがあります。
その場合は、OpenTX/EdgeTX Companionのバージョンアップを待ってください。
OpenTXより開発ペースの速いEdgeTXであれば、OpenTXが未対応のプロポでも、すでに対応している場合もあります。 OpenTXを使用している場合は、EdgeTXへの移行を検討しても良いかもしれません。
OpenTX/EdgeTX Companionが対応しているプロポであるにも関わらず、このエラーが表示される場合は、プロポに格納されているモデル情報ファイルが壊れている可能性あります。 microSDカードを初期化したり交換したり、プロポのファームウェアを更新することにより解消される可能性があります。
現在OpenTX Companionが対応しているプロポの一覧 (OpenTX)
EdgeTX をプロポにインストールする方法
EdgeTX Companionのインストール方法
 するとこのようにモデル一覧が表示されます。
ここには60機の機体情報を「モデル」として登録することができます。
図の例では、1つめのエリアに「モデル01」というダミーの機体情報が登録されています。
現在選択されているモデル名はボールド(太字)で表示されます。
するとこのようにモデル一覧が表示されます。
ここには60機の機体情報を「モデル」として登録することができます。
図の例では、1つめのエリアに「モデル01」というダミーの機体情報が登録されています。
現在選択されているモデル名はボールド(太字)で表示されます。
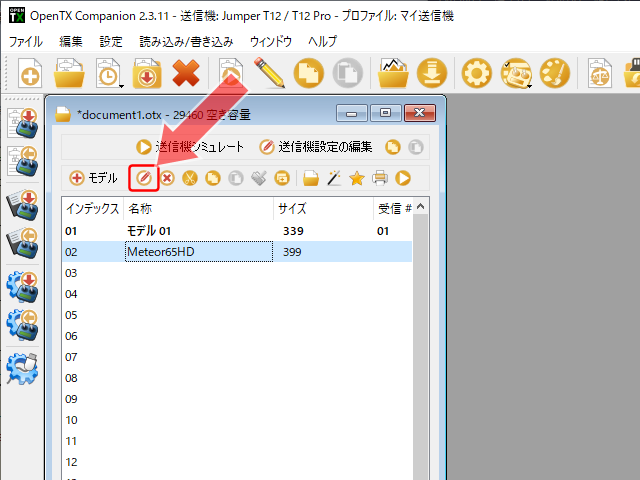
この「モデル01」を編集してもよいのですが、ここでは新たに2つめのエリアに新規登録しましょう。 「02」の列をクリックして
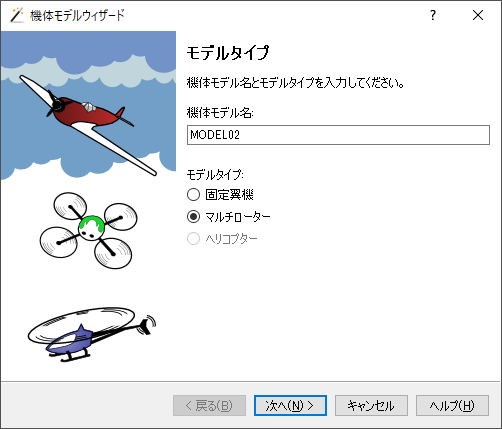 すると「機体モデルウイザード」画面が開きます。
これを使うと最初にスティックのチャンネル割り当て(ミキサー画面の設定)を行い、またタイマーをセットすることができます。
すると「機体モデルウイザード」画面が開きます。
これを使うと最初にスティックのチャンネル割り当て(ミキサー画面の設定)を行い、またタイマーをセットすることができます。
ウイザードを使わないときは「キャンセル」をクリックします。
ウイザードを使うときは「機体モデル名」に任意の名前を入れ、マイクロドローン/FPVドローン/レーシングドローンの場合は「マルチローター」を選び、「次へ」をクリックします。
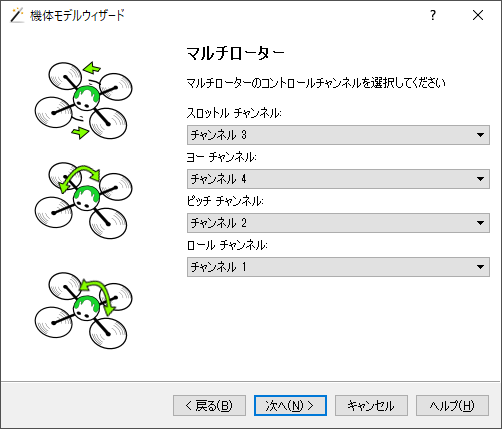 ウイザードを使う場合は、つづいてスティックのチャンネルを割り当てます。
チャンネルを変更したい場合は、ドロップダウンリストから選択します。
設定が終わったら「次へ」をクリックします。
ウイザードを使う場合は、つづいてスティックのチャンネルを割り当てます。
チャンネルを変更したい場合は、ドロップダウンリストから選択します。
設定が終わったら「次へ」をクリックします。
| 挙動の名称 | 舵の名称 |
|---|---|
| スロットル (Throttle) | - |
| ヨー (Yaw) | ラダー (Rudder) |
| ピッチ (Pitch) | エレベーター (Elevator) |
| ロール (Roll) | エルロン (Aileron) |
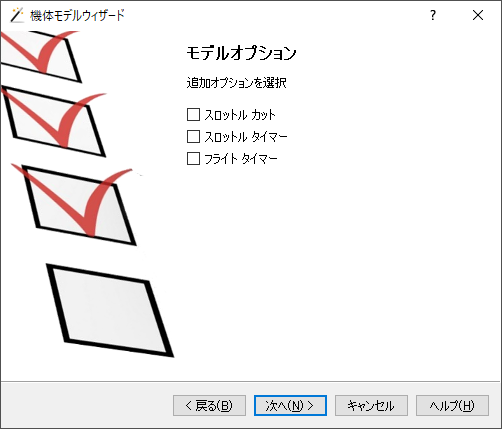 つづいてこのような画面になります。3つのオプションを自動設定するか否かを選択します。
設定したいものにチェックを入れて「次へ」をクリックします。
つづいてこのような画面になります。3つのオプションを自動設定するか否かを選択します。
設定したいものにチェックを入れて「次へ」をクリックします。
スロットル カット
ミキサー画面のスロットルのチャンネルに、スロットルをカットするファンクションが自動的にセットされます。 スイッチを上げたときに、スロットルがウエイト-100となるような設定が追加されます。
スロットル タイマー
スロットルが操作中(ゼロ以外の位置)であった時間をカウントするタイマーを設定します。 トリガーがTHsで、カウンター初期値が00:00:00であるようなタイマーが自動的に設定されます。
フライト タイマー
最初にスロットルがゼロ以外の位置になったときからの合計時間をカウントするタイマーを設定します。 トリガーがTHtで、カウンター初期値が00:00:00であるようなタイマーが自動的に設定されます。
プロポのタイマーの使い方
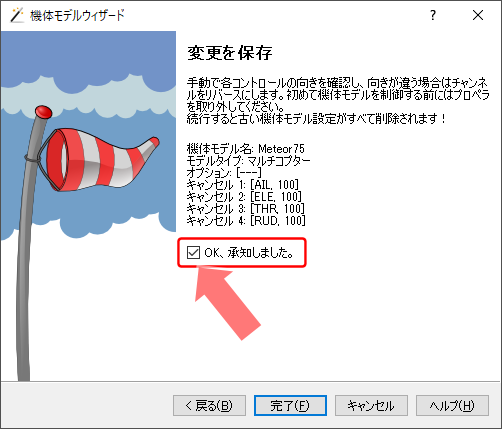 ウイザード画面の最後はこのようになります。
「OK 承知しました」にチェックを入れて「完了」をクリックすると保存されます。
ウイザード画面の最後はこのようになります。
「OK 承知しました」にチェックを入れて「完了」をクリックすると保存されます。
なお「キャンセル 1」とか表示されているのは誤訳で、「チャンネル 1」の間違いです(笑)
 2つめのエントリに新しいモデルができました。
2つめのエントリに新しいモデルができました。
なお、このアイコンの右に並ぶアイコンを使って、モデルの「削除」「切り取り」「コピー」「貼り付け」「挿入」といった操作ができます。 すでに作成済みのモデルをコピーして、一部を編集する、といったこともできます。
パソコンで設定:セットアップ画面の設定
 モデル一覧画面でモデルを選択し、
モデル一覧画面でモデルを選択し、
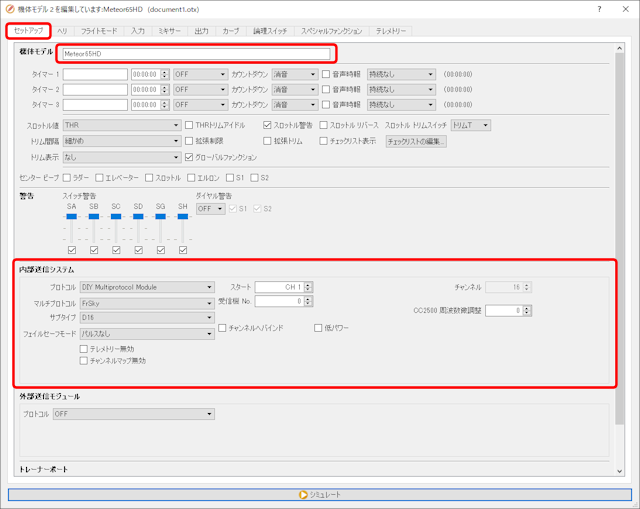
まずは「セットアップ」タブをクリックします。 これはモデルの基本設定を行う画面です。 この画面で入力が必要なのはモデル名と送信プロトコルの設定のみです。 「機体モデル」欄に任意のモデル名を入力しましょう。 モデル名には、英数字、空白、ハイフンが使えます。
これら設定項目すべての詳細については MODEL SETUP設定項目の解説 をご覧ください。
 つづいて送信プロトコルの設定を行います。
プロポに内蔵されている送信機を使う場合は「内部送信システム」欄、
モジュールベイに取り付けた送信機を使う場合は「外部送信モジュール」欄で設定します。
ここには、事前に調べておいたドローンの通信プロトコルをセットします。
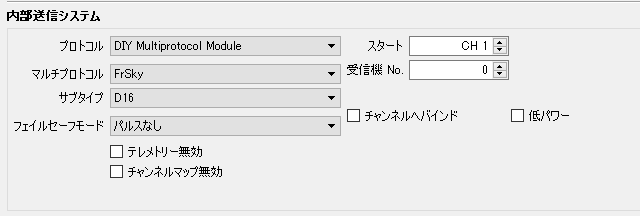
つづいて送信プロトコルの設定を行います。
プロポに内蔵されている送信機を使う場合は「内部送信システム」欄、
モジュールベイに取り付けた送信機を使う場合は「外部送信モジュール」欄で設定します。
ここには、事前に調べておいたドローンの通信プロトコルをセットします。
今回バインドするドローンは、Frskyプロトコルの中の「D16」タイプを使います。 「プロトコル」欄で「DIY Multiprotocol Module(マルチプロトコルモジュール)」を選びます。 「マルチプロトコル」欄で「FrSky」を選択し、「サブタイプ」欄で「D16」を選択します。 その他については変更不要です。
選択したプロトコルによって、この設定画面は変化します。 プロトコルによっては、このほかの項目の設定も必要となります。 FCボードもしくは受信機ボードのWebサイトや説明書を確認してください。
ExpressLRS(ELRS)プロトコルを使用する場合の通信プロトコルの設定方法については ExpressLRS送信機の設定方法 をご覧ください。
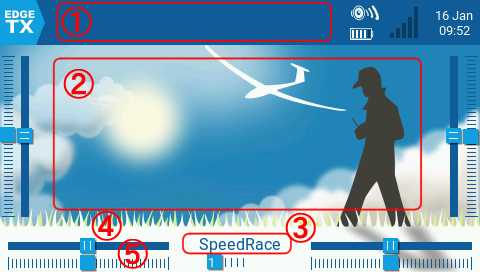 プロポの種類によっては、メイン画面・モデル画像(Model Image)を設定することができます。
モデル画像は、メイン画面や
MODELSEL画面
で、選択中の機体の画像として表示されます。
詳しくは下記をご覧ください。
プロポの種類によっては、メイン画面・モデル画像(Model Image)を設定することができます。
モデル画像は、メイン画面や
MODELSEL画面
で、選択中の機体の画像として表示されます。
詳しくは下記をご覧ください。
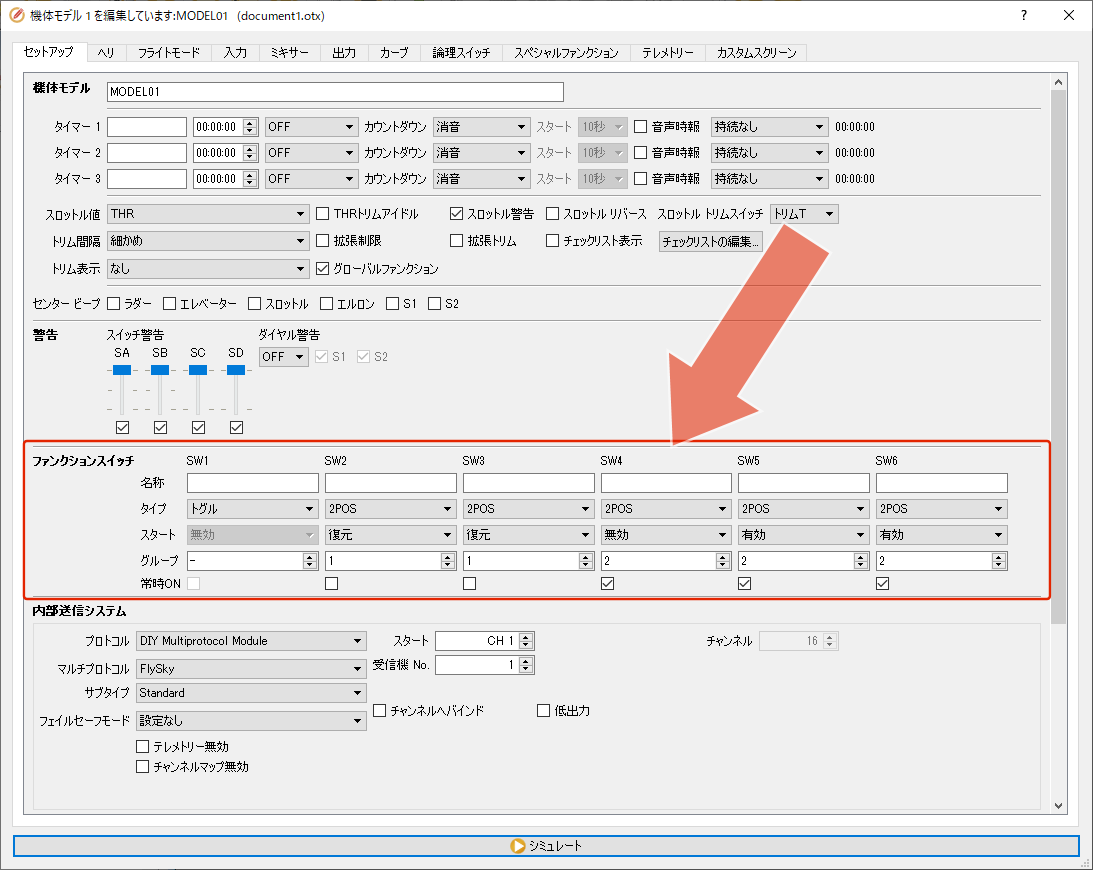 最近のOpenTX/EdgeTXに対応したプロポには、フロントパネルに6つのボタンが並んでいる製品があります。
このスイッチを「ファンクションスイッチ」と呼びます。
プロポに設定する「MODEL」毎に、異なる挙動を設定することができます。
詳しくは下記をご覧ください。
最近のOpenTX/EdgeTXに対応したプロポには、フロントパネルに6つのボタンが並んでいる製品があります。
このスイッチを「ファンクションスイッチ」と呼びます。
プロポに設定する「MODEL」毎に、異なる挙動を設定することができます。
詳しくは下記をご覧ください。
選択した通信プロトコルによっては、この画面の「フェイルセーフモード」欄で、プロポとドローンの通信が切れたときに、ドローンがどのようにふるまうかを指定することができます。 詳しくは フェイルセーフの設定 をご覧ください。
フェイルセーフの設定
パソコンで設定:入力画面の設定
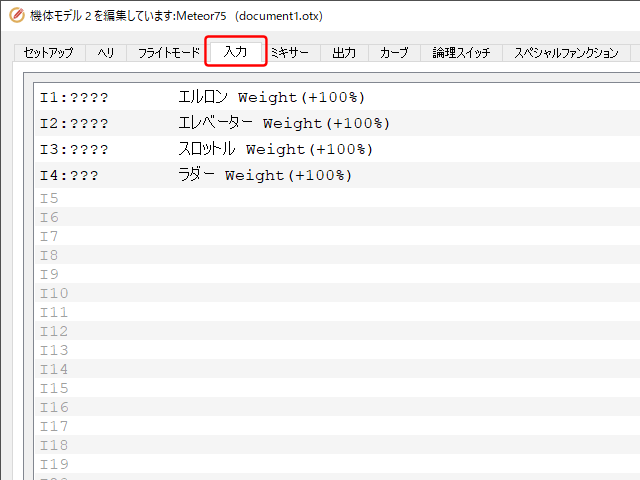 この画面では、操縦に使用する入力機器をリストアップします。プロポに搭載されているスティックやスイッチ、論理スイッチ(LOGICAL SWITCHES)などの入力デバイスを、OpenTX/EdgeTX内部に定義される仮想チャンネルに割り当てる画面とも考えられます。
一番左の[I]マークにつづいて並ぶのが、仮想チャンネルの番号/名前です。
この画面では、操縦に使用する入力機器をリストアップします。プロポに搭載されているスティックやスイッチ、論理スイッチ(LOGICAL SWITCHES)などの入力デバイスを、OpenTX/EdgeTX内部に定義される仮想チャンネルに割り当てる画面とも考えられます。
一番左の[I]マークにつづいて並ぶのが、仮想チャンネルの番号/名前です。
最初の4チャンネルには、すでに Aileron, Elevator, Throttle, Rudder がこの順序で割り当てられています。 この割り当て順序は、メニューの[設定]-[設定]画面の「初期チャンネルマップ」欄の指定で決まります。 あくまで仮想チャンネルなので、割り当てる順序は自由です。 この順序がバインドする機体と一致していないときは、つぎのミキサー画面で変更します。
 仮想チャンネル5~8にスイッチを割り当てていきます。
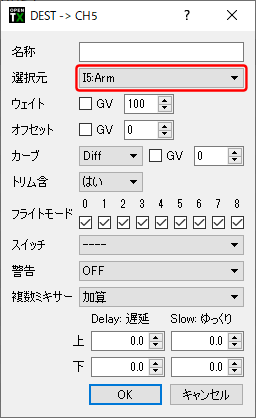
上の画面で「I5」の列をダブルクリックすると、このような画面になります。
入力デバイスの挙動に関する多くの設定が可能ですが、今回はただスイッチの割り当てのみを行います。
仮想チャンネル5~8にスイッチを割り当てていきます。
上の画面で「I5」の列をダブルクリックすると、このような画面になります。
入力デバイスの挙動に関する多くの設定が可能ですが、今回はただスイッチの割り当てのみを行います。
「選択元」欄で、入力デバイスとなるSG(スイッチG)を選択します。 また「入力名」欄でこの仮想チャンネルの表記を変更することができます。今回SGに割り当てるのはArmですので「Arm」と付けました。 この名前は空白のままでも構いません。
同様に仮想チャンネル6~8に SA, SD, SH を割り当てます。 あくまで仮想チャンネルなので、割り当てる順序は自由です。
これら設定項目すべての詳細については MODEL INPUTS設定項目の解説 をご覧ください。
単純に一つのチャンネルに一つのスイッチを割り当てるだけであれば、入力画面にはスイッチを登録せず、次のミキサー画面の「選択元」欄で直接登録することも可能です。
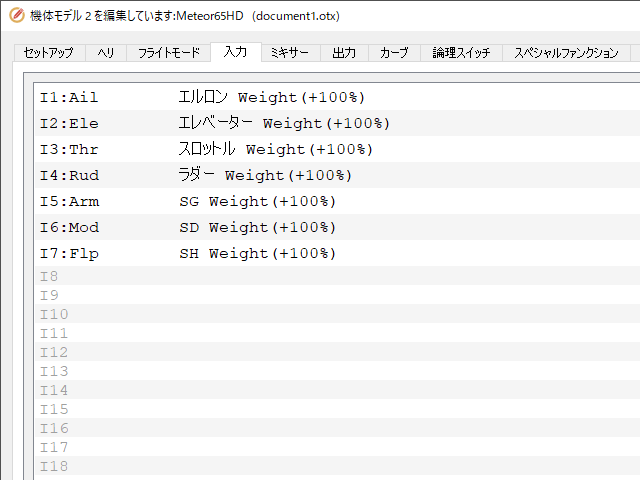 このようになったら入力画面の設定完了です。
このようになったら入力画面の設定完了です。
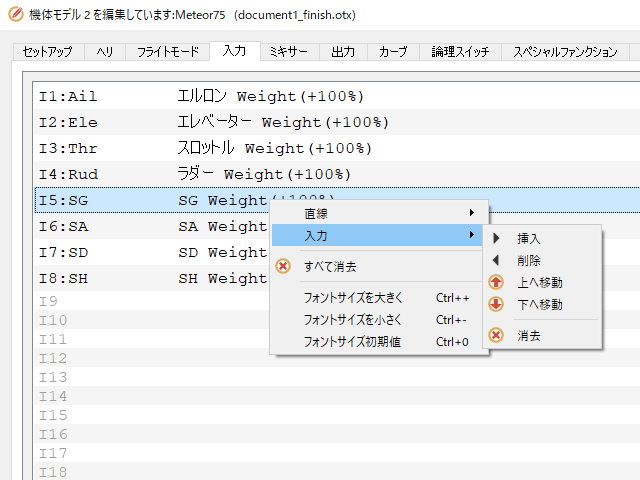 なお、すでに入力済みのチャンネルで右クリックすると、このような画面が表示されます。
編集、前後に新しい入力を挿入、移動、削除ができます。
なお、すでに入力済みのチャンネルで右クリックすると、このような画面が表示されます。
編集、前後に新しい入力を挿入、移動、削除ができます。
パソコンで設定:ミキサー画面の設定
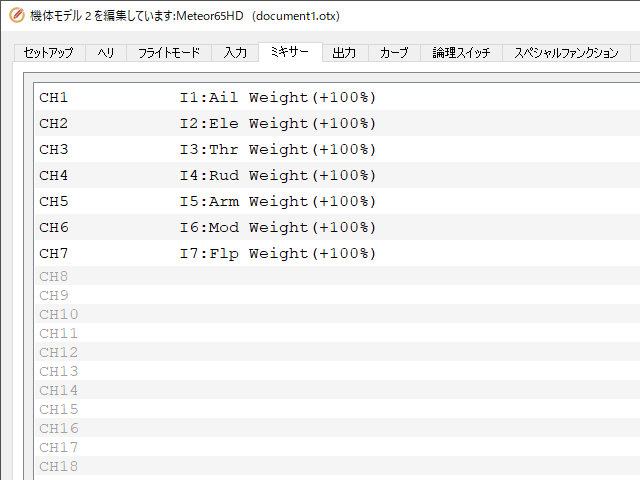
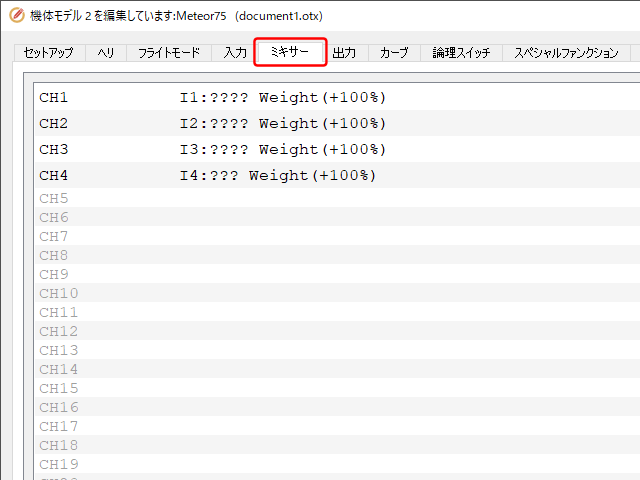 この画面では、入力画面で定義した入力機器(仮想チャンネル)を、受信機(機体)のどの物理チャンネルに送信するかを定義することができます。
一番左には送信先のチャンネル番号が並び、その横に割り当てられた仮想チャンネルの番号が並んでいます。
この画面では、入力画面で定義した入力機器(仮想チャンネル)を、受信機(機体)のどの物理チャンネルに送信するかを定義することができます。
一番左には送信先のチャンネル番号が並び、その横に割り当てられた仮想チャンネルの番号が並んでいます。
最初の4チャンネルには、すでに Aileron, Elevator, Throttle, Rudder がこの順序で割り当てられています。
 物理チャンネル5~8に仮想チャンネルを割り当てていきます。
上の画面でCH5の列をダブルクリックすると、このような画面になります。
仮想チャンネルの挙動に関する多くの設定が可能ですが、今回はただチャンネル番号の割り当てのみを行います。
物理チャンネル5~8に仮想チャンネルを割り当てていきます。
上の画面でCH5の列をダブルクリックすると、このような画面になります。
仮想チャンネルの挙動に関する多くの設定が可能ですが、今回はただチャンネル番号の割り当てのみを行います。
「選択元」欄で、仮想チャンネル「I5」を選択します。 今回は「I5」に"Arm"と名付けているので、「I5:Arm」を選択します。
仮想チャンネルを定義した時に、物理チャンネルと同じ番号を指定していたので、単純に CH5に「I5:Arm」, CH6に「I6:Mod」, CH7に「I7:Flp」 を設定するだけでOKです。
これら設定項目すべての詳細については MODEL MIXES設定項目の解説 をご覧ください。
 このようになったらミキサー画面の設定完了です。
このようになったらミキサー画面の設定完了です。
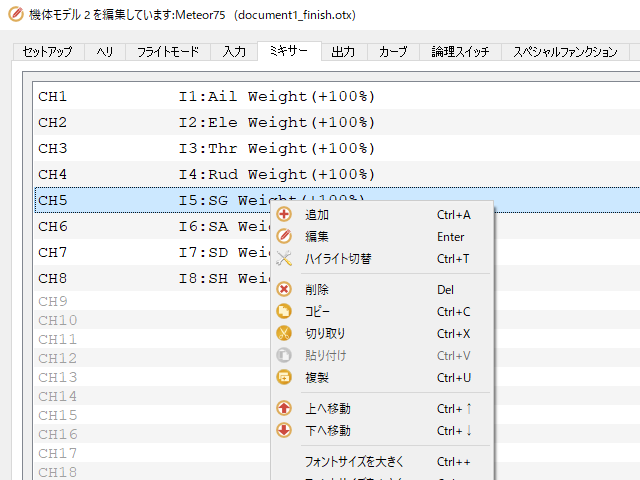 なお、すでに入力済みのチャンネルで右クリックすると、このような画面が表示されます。
追加、編集、削除、コピー、切り取り、複製、順序の変更ができます。
なお、すでに入力済みのチャンネルで右クリックすると、このような画面が表示されます。
追加、編集、削除、コピー、切り取り、複製、順序の変更ができます。
パソコンで設定:プロポへのモデル情報の書き戻し
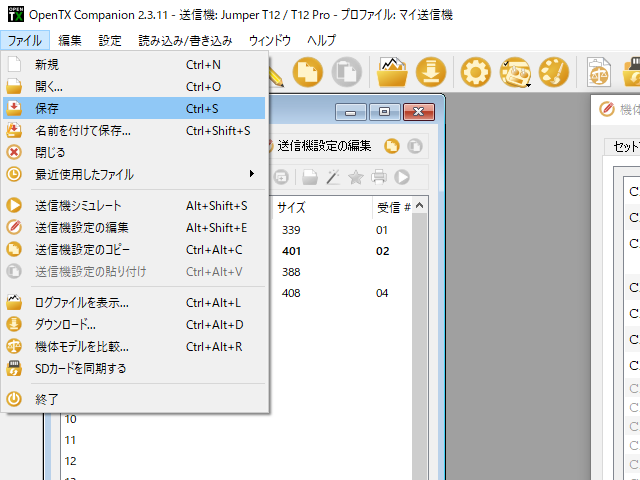 モデルの作成・編集が完了したら、まずバックアップのために、パソコンにモデル情報を保存しておきましょう。
メニューから[ファイル]-[保存]または[ファイル]-[名前を付けて保存]を選ぶだけでOKです。
モデルの作成・編集が完了したら、まずバックアップのために、パソコンにモデル情報を保存しておきましょう。
メニューから[ファイル]-[保存]または[ファイル]-[名前を付けて保存]を選ぶだけでOKです。
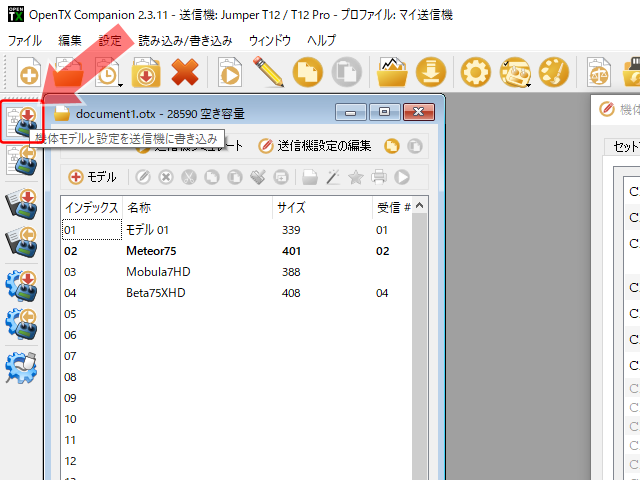 つづいてプロポにモデル情報を転送しましょう。
画面の左に並ぶアイコンの、一番上「機体モデルと設定を送信機に書き込み」をクリックします。
つづいてプロポにモデル情報を転送しましょう。
画面の左に並ぶアイコンの、一番上「機体モデルと設定を送信機に書き込み」をクリックします。
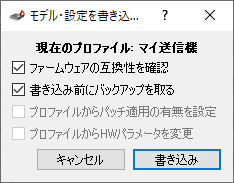 するとこのような画面になります。
「ファームウェアの互換性を確認」
「書き込み前にバックアップを取る」
については好みで設定してください。
するとこのような画面になります。
「ファームウェアの互換性を確認」
「書き込み前にバックアップを取る」
については好みで設定してください。
ここで「書き込み」をクリックすると、モデル情報がプロポに書き込まれます。
モデル作成・ドローンとのバインド・テスト飛行
パソコンからプロポを取り出すときの注意
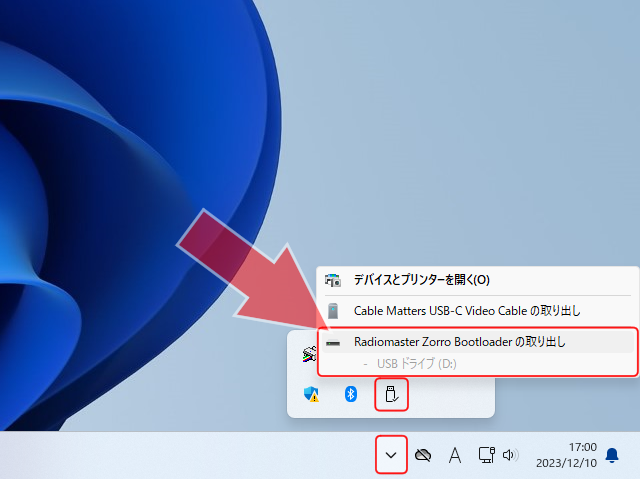 プロポを「USB Storage (SD)」モードでパソコンと接続しているときは、プロポのメモリーがUSBメモリーとして見えています。
パソコンからプロポを取り出すときは、USBメモリーを取り出すときと同様に、「ESD-USB」または「USBドライブ」と「Taranis」あるいは「(あなたのプロポの名前)」、二つのドライブの「取り出し」操作を行ってから取り外します。
プロポを「USB Storage (SD)」モードでパソコンと接続しているときは、プロポのメモリーがUSBメモリーとして見えています。
パソコンからプロポを取り出すときは、USBメモリーを取り出すときと同様に、「ESD-USB」または「USBドライブ」と「Taranis」あるいは「(あなたのプロポの名前)」、二つのドライブの「取り出し」操作を行ってから取り外します。
もっとドローンのことを知りたい
もっとiPhoneのことを知りたい