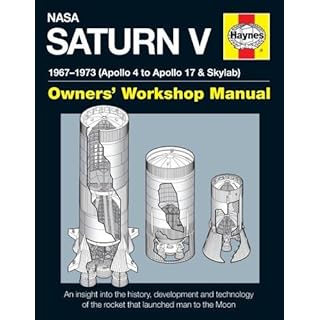
アポロの発射台 モバイルランチャーとアンビリカル・タワー (Mobile Launcher & Launch Umbilical Tower)
Mobile Launcher(ML):モバイルランチャー
 J.L. Pickering")
これは移動式の打ち上げプラットフォームである。 この上に サターンVロケット が組み立てられ、 クローラー・トランスポーター で Pad(発射台) まで運ばれる。 そしてロケットはこの上から月に向かって飛び立つ。

高さは地上から445ft(約135.6m)、避雷針の先端までは 490ft 6inch(約149.5m)で、重量は1050万ポンド(約4,763ton)ある。 MLは、灰色に塗られた2階建ての台座(Launcher Base)、 最上部にハンマーヘッドクレーンを載せた朱色のLUT(Launch Umbilical Tower)、 高さ22ft(約6.7m)の、10本の脚(Support legs)などから構成されている。
1963年7月から1965年3月にかけて、ML-1からML-3までの全部で3台が製造され、その後も利用されるミッションに応じて、常に改修し続けられた。 MLが使用されたアポロ計画の打ち上げミッションは全部で17であり、 最初は、1966年5月に打ち上げられた、初のサターンVロケット無人テスト飛行であるアポロ4号(SA-501)、 最後は、1975年3月に打ち上げられた、アポロ・ソユーズテストプログラム(ASTP:SA-210)である。
Launch Umbilical Tower(LUT):アンビリカル・タワー

これはLauncher Baseの上に取り付けられた、“インターナショナルオレンジ”に塗られた鉄製の構造体で、ロケットに燃料、圧縮空気、電力、水、通信等を供給する。 高さはLauncher Baseから380ft(約115.8m)あり、全部で18階建てである。 1階と2階の高さは30ft(約9.1m)、 その他はそれぞれ20ft(約6.1m) あり、各階は Launcher Base 上面からの高さ(ft)で呼ばれる。 例えば2階は“Level 30”、3階は“Level 60”であり、最上階となる18階は“Level 360”となる。 屋上:“Level 380”には360度回転し、10~25トンの重量を持ち上げられるハンマーヘッドクレーンが設置されている。 そして毎分600ft(183m)で上昇・降下する、2台の高速エレベーターが、Launcher Baseのフロア Aから、LUTのLevel 340までを結ぶ。


火災などの非常時には、飛行士や作業員は2台の高速エレベータに乗って、LUTの作業フロアから避難する。 エレベーターを降りた後、Levle Aから金属製のシュート(Escape tube)を通って爆風を避け、Padのハードスタンドの内側に設けられた、耐熱部屋(Blast room)に退避する。 耐熱部屋には銀行の金庫のような頑丈な金属の扉がついており、ロケット全体の爆発にも耐えることができる。 内部の人々は、救助隊が掘り出し救出するまで、少なくとも24時間生き続けることができる。 あるいはエレベーターBでPadの下まで降り、装甲車両に乗ってPadを離れる。
なおUmbilicalとは日本語で“へその緒”を意味する。
Drawings













Service arms and Access arm:サービスアームとアクセスアーム


LUTには、8本のサービスアームと1本のアクセスアーム、合計9本のアームが取り付けられている。 これらはまたスイングアーム(swing arm)とも呼ばれる。 各アームのサイズは、整備スタッフが、拡張プラットフォームからブースターの点検用ハッチに乗り込めるように、人が通れる(ものによってはジープさえ通れる)サイズとなっている。 各アームの平均的な重さは22トンを超える。
サターンVの組み立てとチェックアウトが行われている間に、 すべてのサービスアームと、S-IC下端に接続されるTail Service Mastsの、完全な機能テストが実施された。 各アームの先端についているアンビリカルハウジングの、ロケットからの切り離し、折り畳み機能の引き込み、アームの回転などがテストされた。

アームは、打ち上げ時の折り畳み方法によって、preflightとinflightの2種類に分類される。 preflightタイプのアームは、T-10秒(打ち上げ10秒前)にロケットから切り離され、タワーにロックされる。 inflightタイプのアームは、Hold-Down Armsに設置されていて、ロケットの垂直上昇開始により起動されるリフトオフ・スイッチにより、離陸中に切り離される。 いずれも圧縮空気と油圧で動作し、また故障時に備えて予備のシステムが備えられている。
アーム No.1 : S-IC Intertank (preflight)

2本の、酸化剤となるLOX(液体酸素)の供給と排気のインターフェースを提供する。 アンビリカルコネクタは、圧縮空気で駆動される複合並行リンクにより引き込まれる。 切り離された後は油圧によりアームが回転し折りたたまれる。 打ち上げが中止された場合に、S-ICからLOXを排出するため、このアームはLCCからリモートで再接続ができる。 T-10秒以降に打ち上げが中止されたときは、LCCからのコマンドで再接続を行う。 アームの切り離しにかかる時間は8秒。 アームの再接続にかかる時間は約5分である。






アーム No.2 : S-IC Forward (preflight)

7本の圧縮空気、8本の電気接続、1本の液体窒素、および2本の空調用インターフェースを提供する。 アンビリカルコネクタは、圧縮空気そのもの、および圧縮空気で駆動されるブロック、 そして滑車とランヤードの組み合わせにより引き込み、回転して折りたたまれる。 さらにメカニカルシステムが補助する。 このアームはT-19秒に切り離される。 アームの切り離しにかかる時間は8秒。






アーム No.3 : S-II Aft (preflight)
ロケット内部への作業者のアクセスに使用される。 また1本のLOXポンプ排気ラインインターフェースを提供する。 このアームは、必要に応じて打ち上げ前の早い時期に引き込まれる。





アーム No.4 : S-II Intermediate (inflight)

燃料となるLH2(液体水素), LOXの注入・排気ライン、圧縮空気、機器冷却、電気接続、空調用インターフェースを提供する。 アンビリカルコネクタの引き込みは、アーム7(S-IVB Forward)と同じシステムである。 引き込みシステム故障時に備え、圧縮空気シリンダーで駆動されるランヤードシステムが付加されている。 アームの切り離しにかかる時間は最大6.4秒。







アーム No.5 : S-II Forward (inflight)

2本のGH2(気化水素)の排気、1本の機器冷却、8本の電気接続、6本の圧縮空気、1本の空調用インターフェースを提供する。 アンビリカルコネクタの引き込みは、アーム7(S-IVB Forward)と同じシステムである。 アームの切り離しにかかる時間は最大7.4秒。





アーム No.6 : S-IVB Aft (inflight)

1本のLH2の注入、1本のLOXの注入、6本の電気接続、11本の圧縮空気と機器冷却、1本の空調用インターフェースを提供する。 アンビリカルコネクタの引き込みは、アーム7(S-IVB Forward)と同じシステムである。 また引き込み動作中にケーブル類を保護するラインハンドリング装置も備えている。 アームの切り離しにかかる時間は最大7.7秒。






アーム No.7 : S-IVB Forward and Instrument Unit (inflight)

1本の水素タンクの排気、24本の電気接続、1本の圧縮空気、1本の空調、そして飛行前調整用インターフェースを提供する。 アンビリカルコネクタの引き込みは、空気圧/油圧冗長デュアルシリンダシステムが使用され、 さらにメカニカルシステムが補助する。 また引き込み動作中にケーブル類を保護するラインハンドリング装置も備えている。 アームの切り離しにかかる時間は最大8.4秒。





アーム No.8 : Service Module (inflight)
 J.L. Pickering")
空調、排気、冷却、電気接続、圧縮空気用インターフェースを提供する。 アンビリカルコネクタの引き込みは、空気圧/メカニカルランヤードシステムが使用される。 さらにメカニカルシステムが補助する。 アームの切り離しにかかる時間は最大9.0秒。




アーム No.9 : Command Module Access Arm (preflight)

環境チャンバー(environmental chamber):通称ホワイトルームを経由して、宇宙船への宇宙飛行士のアクセスを提供する。 このアームはLCCからのコマンドで折り畳み・展開が可能である。 T-43分からT-4分までは12度のパークポジション(スタンバイポジション):宇宙船から約3ft(1m) まで切り離される。 このポジションから展開までにかかる時間は12秒である。






Saturn V Damping, Retract, and Reconnect System (DRRS)

Padに設置されたロケットが風にさらされると、その風下にカルマン(karman)渦(vortex shedding)が発生する。 DRRSは、この渦によるサターンVの振動を減衰させるための支柱である。 この支柱は、自動で展開、ロケットとの接続と切り離し、および引き込みする機能も持っている。



Launcher Base:ランチャーベース


MLの下部を構成する、灰色に塗られた部分をLauncher Baseと呼ぶ。 この長さは160ft4inch(約48.9m)、幅は135ft(約41.1m)、高さは25ft(約7.6m)で、 フロア A(上階) と B(下階) から成る二階建てである。 たくさんの頑丈な鋼鉄桁で構成され、LUTとロケットの重量を支える。
Level 0
Launcher Baseの上面には、 ロケットを固定するための4つのHold-Down Armsと、 S-ICの下端と接続する3つのTail Service Masts(TSM) が設置されている。 ここにはS-ICのPosition II (Engine #1, #2)をLUTの方向に向けた状態で、サターンVロケットが設置される。
Hold-Down Arms:ホールドダウン・アーム

S-ICを取り囲むように、4台が設置されている。 これはロケットの組み立てとPadへの移動の間、ロケットをMLに固定するために使用される。

Tail Service Masts(TSM):テールサービスマスト
")

No.1-2, No.3-2, No.3-4の3本が設置されている。 3本のマストの構造は基本的に同一であるが、接続するケーブル類の数、タイプは異なる。 これら3本のマストは、圧縮空気による押し出し脚(pushoff foot)の助けを借りて、ロケットの上昇移動により機械的に切り離し、折り畳みが行われる。 切り離しにかかる時間は3.0秒である。 押し出し脚が故障した場合は、マストに搭載されたカウンターウエイトにより駆動され、切り離しが行われる。 この時の切り離しにかかる時間は3.2秒である。
TSM No.1-2
サターンV Position IとIIの間、position Iの北に設置され、S-ICのUmbilical plate No.2に接続される。 RP-1燃料、8本の電気接続、10本の圧縮空気、油圧、極低温接続を提供する。

TSM No.3-2
サターンV Position IIとIIIの間、position IIIの北側に設置され、S-ICのUmbilical plate No.3に接続される。 2本の空調、1本の排水ダクト、10本の圧縮空気接続を提供する。
TSM No.3-4
サターンV Position IIIとIVの間、position IIIの南側に設置され、S-ICのUmbilical plate No.1に接続される。 LOXの注入、排気ライン、8本の電気接続、11本の圧縮空気、油圧、極低温接続を提供する。
フロア A (Level A) : 上層階

ここには21個の部屋がある。 デジタル受信器(digital acquisition unit)、 RCA 110Aコンピュータシステム、 サービスアームの作動制御装置、 通信機器、 水噴射制御パネル(water deluge panels)、 その他制御装置が設置されている。
フロア B (Level B) : 下層階

ここには22個の部屋がある。 油圧機器(hydraulic charging units)、 環境制御システム、 電気測定装置、 計測および通信インターフェース用の端末室 が設置されている。
Exhaust Chamber : 排気口
ロケットの排気を逃がすための、Launcher Baseを貫通する四角い穴である。 サイズは一辺が45 ft(約13.7m)。 打ち上げ時には、この直下にFlame Deflector(噴射偏向器)が設置される。 ここは交換可能なスチール製のブラストシールドで覆われており、リフトオフの2秒後に開始されるウォーターカーテンによって冷却される。
Mount Mechanisms : 据え付け機構
MLを支える高さ22ft(約6.7m)の6本の脚である。 クローラー・トランスポーターが下に入り込める高さがある。 PadとVABに於いて、MLを正確な位置に固定するのに使われる。
Extensible Columns : 拡張桁
MLを支える4本の取り外し可能な油圧台座である。 Exhaust Chamberの四隅の下に設置される。 Padにおいて、6百万ポンド(3千トン)に達するSatrunVを保持するため、 またはエンジンカットオフ時のリバウンドを抑止するために使用される。
Drawings













Water Deluge System:散水システム

LUTとLauncher Baseには、打ち上げ時の冷却と火災防止のために、Water Deluge Systemという、大量の水を散水するシステムが搭載されている。 LUTでは、サービスアームが格納されると同時に散水が始まり、アームの冷却を行う。 Launcher BaseのLevel 0には、29本の散水ノズルがあり、ロケットのリフトオフとともに散水が始まる。 この散水は、最初の30秒間は50,000ガロン/分で行われ、その後は20,000ガロン/分で継続する。 また発射台の下にある Exhaust flame trench : フレームトレンチの両壁には一連の散水ノズルがついており、リフトオフの10秒前から8,000ガロン/分で散水される。 また、宇宙飛行士や技術者の非常脱出ルートを含め、Padのあちこちに散水ノズルが設置されており、こぼれた燃料を洗い流し、火の粉による火災の発生を抑える。
Milkstool:ミルクスツール


Drawings





Mobile Launcherの歴史
ML-1
 lifts off from pad 39B NASA")
最初に使用されたのは、1966年5月25日に実施された、SA-500F のVABからLC-39Aへの移送である。 このSA-500Fは、打ち上げまでの手順と関連機器をテストするために作られたフルエンジニアリングモックアップであり、燃料タンクと、ポンプやセンサーなどの燃料の注入、排出にかかわる機器は搭載されているが、エンジンは取り付けられておらず、飛行することはできない。 また実際に飛行したサターンVとは、一部外見が異なる。これは、のちに解体されて各種テストに使用された。
ML-1を使用した最初の打ち上げは、初のサターンVロケットの無人テスト飛行であるアポロ4号(SA-501)である。 そして最初に月着陸に成功した アポロ11号(SA-506) を打ち上げたのもML-1である。 また、Skylabミッションにおいては、 サターン1Bロケット の打ち上げに使用するために‘Milkstool(ミルクスツール)’の取り付けが行われ、大きく改装された。 そしてアポロ・ソユーズテストプログラム(ASTP)において、最後のアポロ宇宙船の打ち上げに使われたのも、このML-1であった。
スペースシャトルの時代には Mobile Launch Platform-3 (MLP-3)に改造され、1995年のロシアの宇宙ステーション「ミール」へのスペースシャトル打ち上げ、1998年の国際宇宙ステーションへの最初のミッション、2011年の最後のスペース シャトルの打ち上げなど、33回の打ち上げに使用された。 その後しばらくVABのHigh Bay 2に保管されていたが、アルテミス計画のブースター建造の場所を提供するため、2023年春に解体される予定である。
ML-2

1968年4月4日に打ち上げられた、2回目のサターンVロケットの無人テスト飛行であるアポロ6号(SA-502)で初めて使用された。 Tail Service Masts (TSM)のデザインは、ML-1でのアポロ4号の打ち上げ時に深刻なダメージを受けたため修正され、以降のサターンVの打ち上げのすべてに適用された。 ML-2はのちにSkylab計画においてアクセスアームの位置が下げられた。 これによりSkylab 1号となるサターンVの、実験室セクション(S-IVを改修したもの)に、アクセスアームが接続できるようになった。
スペースシャトルの時代には Mobile Launch Platform-2 (MLP-2)に改造され、STS-51L スペースシャトル チャレンジャー号の打ち上げを含む、40回を超える打ち上げに使用された。 その後しばらくmobile servicing structure park sideに保管されていたが、アルテミス計画用の新しいML-1(上記アポロ時代のML-1とは異なる)の建造のため、2021年初頭に解体された。
ML-3
1969年5月18日にPad 39Bから打ち上げられた アポロ10号(SA-505) で初めて使用された。 なお、Pad 39Bから打ち上げられた、月を目指したロケットは、このアポロ10号だけである。
スペースシャトルの時代には Mobile Launch Platform-1 (MLP-1)に改造され、50回を超える打ち上げに使用された。 その後アルテミス計画においては、SLS打ち上げのためのクローラーウェイの整備に使用されている。
アポロ計画終了後
スペースシャトルの時代を迎えると、3台のMLすべてからLUTが取り外された。 そしてLauncher Basesはスペースシャトル向けに改造され、Mobile Launcher Platforms (MLP)となった。
取り外されたML-2とML-3のLUTは、スペースシャトル打ち上げ用の、Padに固定された発射台施設 : Fixed Service Structure (FSS)に流用された。 そしてこれには新造の回転式の構造体、Rotating Service Structure (RSS)が取り付けられた。これはスペースシャトルのカーゴベイをすっぽり包み込むクリーンルームとして機能した。
ML-1のLUTとMilkstoolは、 当時興った 保存キャンペーン(Save The LUT) の結果、1980年代半ばに、後日比較的容易に再構築できるように慎重に解体された。 そしてJohn F. Kennedy Space Center (KSC)の本部ビルの裏の屋外に留置された。 しかし20年にわたる放置の結果腐食が進み、有毒な鉛塗料が土壌を汚染する可能性が出てきた。 このため2004年の初頭にスクラップにされ、中国湖北省で三峡ダムプロジェクトの一部に使用されたと言われている。
Mobile Launcherの運用
Mobile Launcherの模型

参考サイト